Variable FIR Decimation
Libraries:
DSP System Toolbox /
Filtering /
Multirate Filters
Description
The Variable FIR Decimation block performs an efficient polyphase FIR decimation with a tunable decimation factor. You can update the decimation factor and the filter coefficients in the block dialog box or through an input port while the simulation is running. To control the decimation, you can specify the decimation factor or the output frame length.
When you specify the decimation factor, if the input frame length changes (variable-size signal) during simulation, the output frame length also changes in order to keep the decimation factor constant. When you specify the output frame length instead of the decimation factor, and if the input frame length changes (variable-size signal) during simulation, the decimation factor also changes in order to keep the output frame length constant.
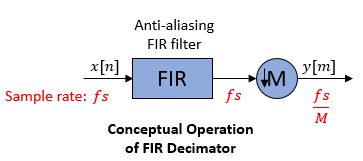
Conceptually, the FIR decimator (as shown in the schematic) consists of an anti-aliasing
FIR filter followed by a downsampler. To design an FIR anti-aliasing filter, use the designMultirateFIR function.
The FIR filter filters the data in each channel of the input using a direct-form FIR filter. The downsampler that follows downsamples each channel of filtered data by taking every M-th sample and discarding the M – 1 samples that follow. M is the value of the decimation factor. The resulting discrete-time signal has a sample rate that is 1/M times the original sample rate.
Note that the actual block algorithm implements a direct-form FIR polyphase structure, an efficient equivalent of the combined system depicted in the diagram. For more details, see Algorithms.
The block supports C and C++ code generation.
Examples
Since R2023b
Decimate a sinusoidal signal whose frame size varies during simulation. The Variable FIR Decimation block determines the frame size of the decimated output based on the value of the Specification parameter.
Specify Decimation Factor
Open and inspect the SpecifyDecimationFactor.slx model. The Specification parameter in the Variable FIR Decimation block dialog box is set to Decimation factor. In this mode, you specify the decimation factor in the block dialog box or through an input port. When the input frame size varies during simulation, the block maintains this decimation factor and varies the output frame size so that output frame size equals the ratio of input frame size and decimation factor.
The Variable FIR Decimation block outputs a variable-size signal.

Specify Output Frame Length
Open and inspect the SpecifyOutputFrameLength.slx model. The Specification parameter in the Variable FIR Decimation block dialog box is set to Output frame length. In this mode, you specify the output frame length in the block dialog box. During simulation, when the input frame size varies, the block varies the decimation factor in order to maintain the frame length of the output signal. The output frame size equals the ratio of input frame size and decimation factor.
The Variable FIR Decimation block outputs a fixed-size signal.

Decimate a sinusoidal signal by varying the decimation factor using the Variable FIR Decimation block. You can vary the decimation factor in the block dialog box or through an input port while the simulation is running.
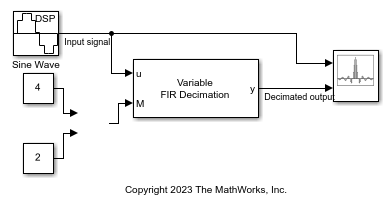
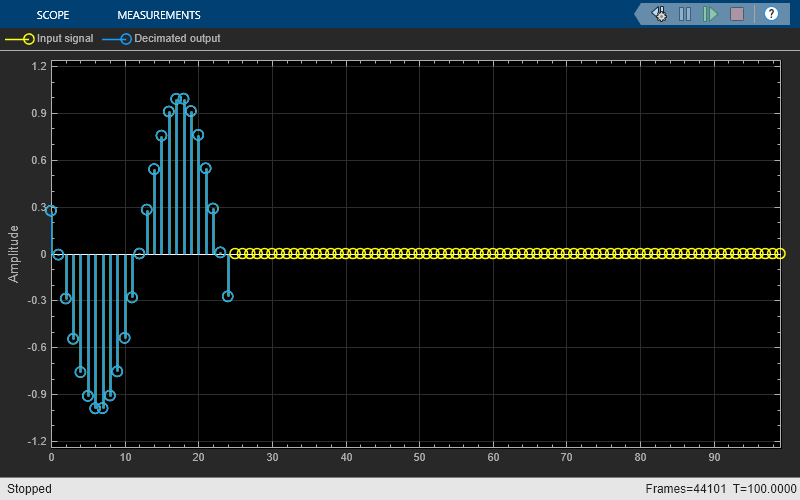
Open the tunable_decimation_factor.slx model. The input is a sinusoidal signal with a frequency of 500 Hz, sample time of 1/44100 s, and contains 100 samples per frame. Pass this signal through the Variable FIR Decimation block. The Maximum decimation factor parameter in the block is 24. The decimation factor that you input through the port is 4.
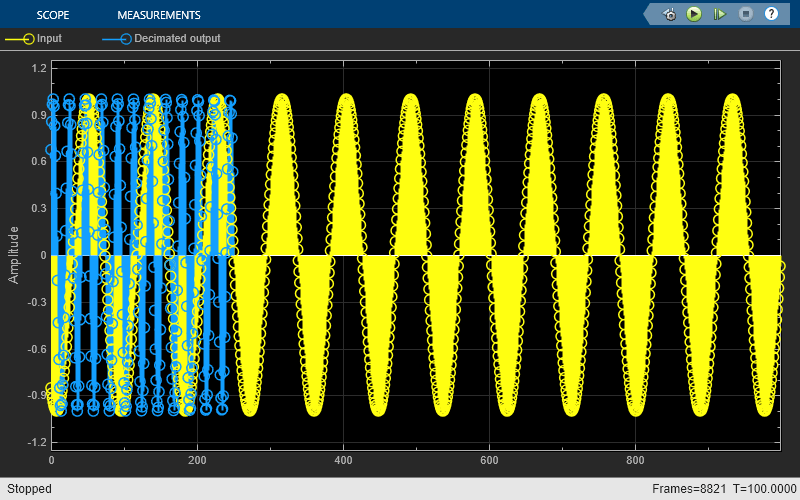
Run the model. The Array Plot block shows the input signal and the decimated output on the display.
While the simulation is running, change the decimation factor to 2 by clicking the Manual Switch. The span of the decimated output updates in the Array Plot display. You can change the decimation factor to any value that is an integer factor of the maximum decimation factor of 24.

If you specify the decimation factor in the block dialog box, you can tune the Decimation factor parameter in the block dialog box while the simulation is running and the block updates the decimated output accordingly.
Decimate a sinusoidal signal using the Variable FIR Decimation block. You can vary the filter coefficients in the block dialog or through an input port while the simulation is running.
Open the tunable_filter_coefficients.slx model. The input is a sinusoidal signal with a frequency of 500 Hz, sample time of 1/44100 s, and contains 100 samples per frame. Pass this signal through the Variable FIR Decimation block. The Maximum decimation factor parameter in the Variable FIR Decimation block is set to 24. Specify the decimation factor and the filter coefficients through the M and the coeffs ports, respectively. The decimation factor is 4 and the filter coefficients are generated using the designMultirateFIR(1,24) function. This function generates an effective anti-aliasing lowpass filter with a normalized cutoff frequency no greater than 1/24.
You can vary the filter coefficients using the Manual Switch.

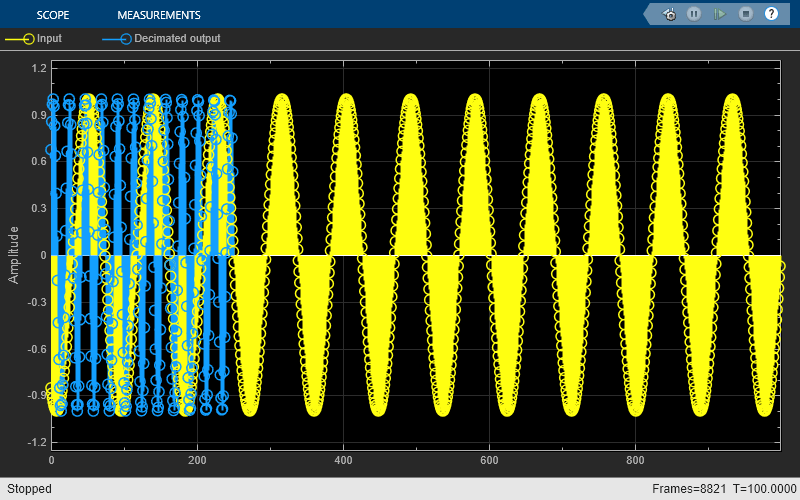
Run the model. The Array Plot block shows the input signal and the decimated output in the display.

While the simulation is running, change the filter coefficients by clicking the Manual Switch. On the second branch, the fir1 function generates the coefficients of a lowpass filter that has a similar passband frequency response and the same number of coefficients as the first filter. Note that you cannot change the number of filter coefficients while the simulation is running.

Ports
Input
Output
Parameters
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
More About
Algorithms
The FIR decimation filter is implemented efficiently using a polyphase structure. For more information on polyphase filters, see Polyphase Subfilters.
To derive the polyphase structure, start with the transfer function of the FIR filter
where N+1 is the length of the FIR filter.
You can rearrange this equation as
where Mmax is the number of polyphase components, and its value equals the maximum decimation factor.
You can write H(z) as
where E0(zMmax), E1(zMmax), ..., EMmax-1(zMmax) are the polyphase components of the FIR filter H(z).
During simulation, the algorithm reconstructs the filter H(z) based on the current decimation factor M.
Rewriting H(z) in terms of the decimation factor M yields
where r = Mmax/M.
Conceptually, the FIR decimation filter contains a lowpass FIR filter followed by a downsampler.

Replace H(z) with its polyphase representation.

This is the multirate noble identity for decimation.

Applying the noble identity for decimation moves the downsampling operation to before the filtering operation. This move enables you to filter the signal at a lower rate.

You can replace the delays and the decimation factor at the input with a commutator switch. The switch starts on the first branch 0 and moves in the counterclockwise direction as shown in this diagram. The accumulator at the output receives the processed input samples from each branch of the polyphase structure and accumulates these processed samples until the switch goes to branch 0. When the switch goes to branch 0, the accumulator outputs the accumulated value.

When the first input sample is delivered, the switch feeds this input to the branch 0 and the decimator computes the first output value. As more input samples come in, the switch moves in the counter clockwise direction through branches (M−1)r, (M−2)r, and all the way up to branch 0, delivering one sample at a time to each branch. When the switch comes to branch 0, the decimator outputs the next set of output values. This process continues as data keeps coming in. Every time the switch comes to the branch 0, the decimator outputs y[m]. The decimator effectively outputs one sample for every M samples it receives. Hence the sample rate at the output of the FIR decimation filter is fs/M.
References
[1] Orfanidis, Sophocles J. Introduction to Signal Processing. Upper Saddle River, NJ: Prentice-Hall, 1996.