generateWaypoints
Syntax
Description
Add-On Required: This feature requires the Automated Driving Toolbox Test Suite for Euro NCAP Protocols add-on.
Lane Change Waypoints
[
generates waypoints, waypoints,yaw] = generateWaypoints(descriptor,"LaneChange",source,destination)waypoints, and yaw angles,
yaw, to change lanes from a source lane,
source, to a destination lane, destination,
for the input scenario descriptor, descriptor.
[___] = generateWaypoints(
generates waypoints from a source, descriptor,"LaneChange",source,laneChangeDistance)source, to a destination on its
left lane located at a specified distance, laneChangeDistance, along
the travel direction of lane.
[___] = generateWaypoints(___,
specifies options using one or more name-value arguments in addition to any combination of
arguments from previous syntaxes. For example, Name=Value)NumSamples=10 generates
waypoints that contain 10 samples.
Lane Drift Waypoints
[
generates waypoints for the vehicle to drift out of the source lane based on the specified
drift curvature, type, and lateral distance or angle, as well as the actor width.waypoints,yaw] = generateWaypoints(descriptor,"LaneDrift",source,radiusOfCurvature,driftType,driftValue,actorWidth)
[___] = generateWaypoints(
specifies options using one or more name-value arguments.descriptor,"LaneDrift",source,radiusOfCurvature,driftType,driftValue,actorWidth,Name=Value)
Examples
Load a driving scenario into the workspace.
load("scenarioWithLanes.mat")Create a scenario descriptor from the loaded driving scenario.
descriptor = getScenarioDescriptor(scenario,Simulator="DrivingScenario");Initialize lane change parameters.
source = [13 -0.14 0]; % Units are in meters destination1 = [54.7 4.5 0]; % Units are in meters destination2 = [-15 4.5 0]; % Units are in meters laneChangeDistance = 30; % Units are in meters
Generate waypoints using the source and destination parameters.
waypoints1 = generateWaypoints(descriptor,"LaneChange",source,destination1);Generate a trajectory from source to destination that contains 1000 sample waypoints.
waypoints2 = generateWaypoints(descriptor,"LaneChange",source,destination2,NumSamples=1000);Generate waypoints using the source and laneChangeDistance parameters.
waypoints3 = generateWaypoints(descriptor,"LaneChange",source,laneChangeDistance);Generate waypoints to perform a lane change to the lane on the right side of the actor lane.
waypoints4 = generateWaypoints(descriptor,"LaneChange",source,laneChangeDistance,Direction="right");
Generate waypoints in the opposite of the lane direction in the driving scenario.
waypoints5 = generateWaypoints(descriptor,"LaneChange",source,laneChangeDistance,LaneDirectionality="opposite");
Visualize the five sets of generated waypoints.
plot(scenario) hold on plot(waypoints1(:,1),waypoints1(:,2),"r") plot(waypoints2(:,1),waypoints2(:,2),"g") plot(waypoints3(:,1),waypoints3(:,2),"b") plot(waypoints4(:,1),waypoints4(:,2),"y") plot(waypoints5(:,1),waypoints5(:,2),"k") hold off axis([-20 70 -20 30])

Load a driving scenario into the workspace.
load("scenarioWithLanes.mat")Create a scenario descriptor from the scenario.
descriptor = getScenarioDescriptor(scenario,Simulator="DrivingScenario");Initialize lane drift parameters.
actorWidth = 1.8; % Units are in meters radiusOfCurvature = 1200; % Units are in meters driftType = "curveDriftDistance"; driftValue = 0.54; % Units are in meters lateralDistanceD1 = 0.54; % Units are in meters lateralDistanceD2 = 0.6; % Units are in meters laneYCoordinate = 1.9; % Units are in meters descY = laneYCoordinate - (lateralDistanceD1 + lateralDistanceD2 + actorWidth/2); source = [13 descY 0];
Generate waypoints to drift the actor to the lane on the left side of the actor lane.
waypoints1 = generateWaypoints(descriptor,"LaneDrift",source,radiusOfCurvature,driftType,driftValue,actorWidth);Generate waypoints to drift the actor to the lane on the right side of the actor lane.
waypoints2 = generateWaypoints(descriptor,"LaneDrift",source,radiusOfCurvature,driftType,driftValue,actorWidth,Direction="right");
Visualize the two sets of generated waypoints.
plot(scenario) hold on plot(waypoints1(:,1),waypoints1(:,2),"r") plot(waypoints2(:,1),waypoints2(:,2),"g") hold off axis([0 120 -20 30])

Input Arguments
Name-Value Arguments
Specify optional pairs of arguments as
Name1=Value1,...,NameN=ValueN, where Name is
the argument name and Value is the corresponding value.
Name-value arguments must appear after other arguments, but the order of the
pairs does not matter.
Example: generateWaypoints(descriptor,"LaneChange",source,destination,NumSamples=10)
generates waypoints containing 10 samples.
Number of lanes to change, specified as a scalar.
Dependencies
To specify this argument, you must use one of these syntaxes:
The second input argument is
"LaneChange"and the fourth input argument islaneChangeDistance.The second input argument is
"LaneDrift".
Perpendicular distance between the destination and the nearest lane edge, specified as a positive scalar. Units are in meters.
Dependencies
To specify this argument, you must specify the second input argument as
"LaneChange" and the fourth input argument as
laneChangeDistance.
Distance from the source location to the location before the actor drifts, specified as a positive scalar. Units are in meters.
Dependencies
To specify this argument, you must specify the second input argument as
"LaneDrift".
Distance from the location after the actor drifts to the destination location, specified as a positive scalar. Units are in meters.
Dependencies
To specify this argument, you must specify the second input argument as
"LaneDrift".
Direction of the end waypoint with reference to the source, specified as
"left" or "right".
Radius of curvature for lane change, specified as a positive scalar. Units are in meters.
Dependencies
To specify this argument, you must specify the second input argument as
"LaneChange".
Number of waypoint samples to generate, specified as a positive scalar.
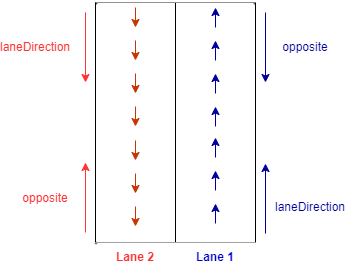
Direction of lane change with reference to lane direction in the input scenario
descriptor, specified as "laneDirection" or
"opposite".
Output Arguments
Limitations
The function does not support generating waypoints for the roads with composite lanes
specified by the compositeLaneSpec
objects.
More About
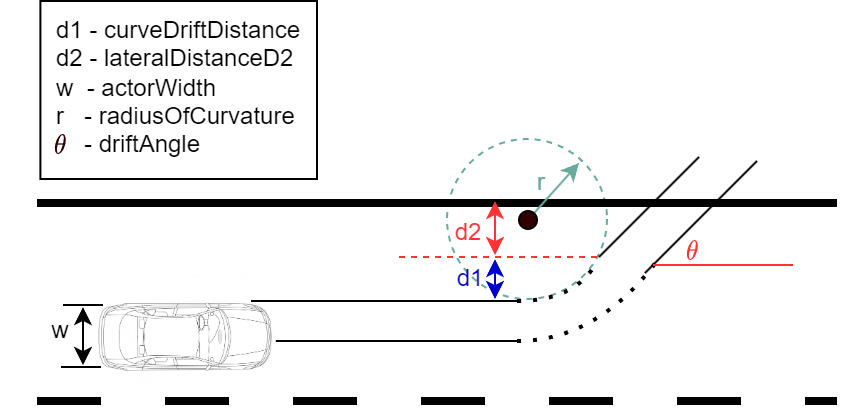
To generate waypoints using the "LaneDrift" input argument, as per
Euro NCAP standards, the source must be located at a distance from the lane edge
curveDriftDistance + actorWidth/2 +
lateralDistanceD2,
where,
curveDriftDistanceis the lateral distance traveled during the curve that establishes thedriftAngle.actorWidthis the width of the actor.lateralDistanceD2is the lateral distance traveled after the curve that establishes thedriftAngle, but before crossing the lane edge.
References
[1] European New Car Assessment Programme (Euro NCAP). Test Protocol – Lane Support Systems. Version 4.2. Euro NCAP, November 2022.
Version History
Introduced in R2024a