driving.ReedsSheppPathSegment
Reeds-Shepp path segment
Description
A driving.ReedsSheppPathSegment object represents a segment of a planned vehicle
path that was connected using the Reeds-Shepp connection method [1]. A Reeds-Shepp path
segment is composed of a sequence of three to five motions. Each motion is one of these
types:
Straight (forward or reverse)
Left turn at the maximum steering angle of the vehicle (forward or reverse)
Right turn at the maximum steering angle of the vehicle (forward or reverse)
The driving.ReedsSheppPathSegment objects that represent a path are stored in the
PathSegments property of a driving.Path
object. These paths are planned by a pathPlannerRRT
object whose ConnectionMethod property is set to
'Reeds-Shepp'.
Properties
Examples
Plan a vehicle path through a parking lot by using the optimal rapidly exploring random tree (RRT*) algorithm. The planned path is composed of a sequence of Reeds-Shepp path segments. Check that the path is valid, and then plot the transition poses along the path.
Load a costmap of a parking lot. Plot the costmap to see the parking lot and inflated areas for the vehicle to avoid.
data = load('parkingLotCostmapReducedInflation.mat');
costmap = data.parkingLotCostmapReducedInflation;
plot(costmap)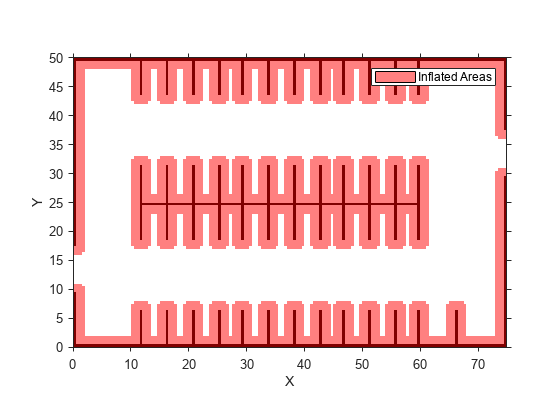
Define start and goal poses for the vehicle as [x, y, Θ] vectors. World units for the (x,y) locations are in meters. World units for the Θ orientation angles are in degrees.
startPose = [4, 4, 90]; % [meters, meters, degrees]
goalPose = [48.75, 29.75, 90];Use a pathPlannerRRT object to plan a path from the start pose to the goal pose. Set the ConnectionMethod property of the pathPlannerRRT object to 'Reeds-Shepp'.
planner = pathPlannerRRT(costmap);
planner.ConnectionMethod = 'Reeds-Shepp';
refPath = plan(planner,startPose,goalPose);Check that the path is valid.
isPathValid = checkPathValidity(refPath,costmap)
isPathValid = logical
1
Interpolate the transition poses along the path.
transitionPoses = interpolate(refPath);
Plot the planned path and the transition poses on the costmap.
hold on plot(refPath,'DisplayName','Planned Path') scatter(transitionPoses(:,1),transitionPoses(:,2),[],'filled', ... 'DisplayName','Transition Poses') hold off
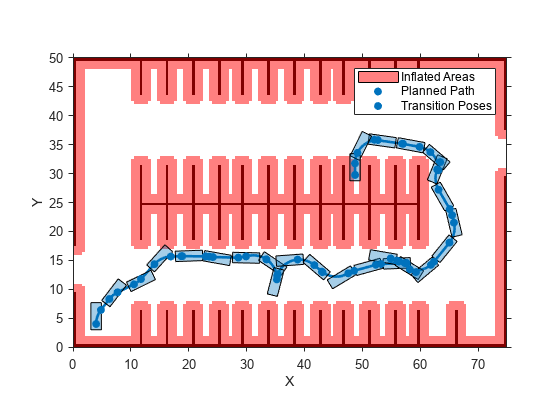
Notice that the path from the start pose to the goal pose requires at least one reverse motion before sliding into the parking spot at the goal position. In such scenarios where a reverse motion is required to reach the goal pose, Reeds-Shepp path segments are useful as Dubins path segments do not allow reverse motion.
References
[1] Reeds, J. A., and L. A. Shepp. "Optimal Paths for a Car That Goes Both Forwards and Backwards." Pacific Journal of Mathematics. Vol. 145, Number 2, 1990, pp. 367–393.
Extended Capabilities
Version History
Introduced in R2018b