resnet3dNetwork
Syntax
Description
net = resnet3dNetwork(inputSize,numClasses)
To create a 2-D residual network, use resnetNetwork.
net = resnet3dNetwork(inputSize,numClasses,Name=Value)BottleneckType="none" returns a 3-D residual neural network without
bottleneck components.
Examples
Create a 3-D residual network with a bottleneck architecture.
imageSize = [224 224 224 3]; numClasses = 10; net = resnet3dNetwork(imageSize,numClasses)
net =
dlnetwork with properties:
Layers: [176×1 nnet.cnn.layer.Layer]
Connections: [191×2 table]
Learnables: [214×3 table]
State: [106×3 table]
InputNames: {'input'}
OutputNames: {'softmax'}
Initialized: 1
View summary with summary.
Analyze the network using the analyzeNetwork function.
analyzeNetwork(net)

Create a 3-D ResNet-101 network using a custom stack depth.
imageSize = [224 224 64 3]; numClasses = 10; stackDepth = [3 4 23 3]; numFilters = [64 128 256 512]; net = resnet3dNetwork(imageSize,numClasses, ... StackDepth=stackDepth, ... NumFilters=numFilters)
net =
dlnetwork with properties:
Layers: [346×1 nnet.cnn.layer.Layer]
Connections: [378×2 table]
Learnables: [418×3 table]
State: [208×3 table]
InputNames: {'input'}
OutputNames: {'softmax'}
Initialized: 1
View summary with summary.
Analyze the network.
analyzeNetwork(net)

Input Arguments
Name-Value Arguments
Output Arguments
More About
Residual networks (ResNets) are a type of deep network that consists of building blocks that have residual connections (also known as skip or shortcut connections). These connections allow the input to skip the convolutional units of the main branch, thus providing a simpler path through the network. By allowing the parameter gradients to flow more easily from the final layers to the earlier layers of the network, residual connections mitigate the problem of vanishing gradients during early training.
The structure of a residual network is flexible. The key component is the inclusion of the residual connections within residual blocks. A group of residual blocks is called a stack. A ResNet architecture consists of initial layers, followed by stacks containing residual blocks, and then the final layers. A network has three types of residual blocks:
Initial residual block — This block occurs at the start of the first stack. The layers in the residual connection of the initial residual block determine if the block preserves the activation sizes or performs downsampling.
Standard residual block — This block occurs multiple times in each stack, after the first downsampling residual block. The standard residual block preserves the activation sizes.
Downsampling residual block — This block occurs once, at the start of each stack. The first convolutional unit in the downsampling block downsamples the spatial dimensions by a factor of two.
A typical stack has a downsampling residual block, followed by
m standard residual blocks, where m is a positive
integer. The first stack is the only stack that begins with an initial residual block.

The initial, standard, and downsampling residual blocks can be bottleneck or nonbottleneck blocks.
A bottleneck block reduces the number of channels by a factor of four by performing a convolution with filters of size 1 before performing convolution with filters of size 3. Networks with and without bottleneck blocks have a similar level of computational complexity, but the total number of features propagating in the residual connections is four times larger when you use bottleneck units. Therefore, using a bottleneck increases the efficiency of the network [1].
The options you set determine the layers inside each block.
Block Layers
| Name | Initial Layers | Initial Residual Block | Standard Residual Block
(BottleneckType="downsample-first-conv") | Standard Residual Block
(BottleneckType="none") | Downsampling Residual Block | Final Layers |
| Description | A residual network starts with these layers, in order:
| The main branch of the initial residual block has the same layers as a standard residual block. The
If | The standard residual block with bottleneck units has these layers, in order:
The standard block has a residual connection from the output of the previous block to the addition layer. Set the position of the addition layer using the
| The standard residual block without bottleneck units has these layers, in order:
The standard block has a residual connection from the output of the previous block to the addition layer. Set
the position of the addition layer using the
| The downsampling residual block is the same as the standard
block (either with or without the bottleneck) but with a stride of
size The
layers on the residual connection depend on the value of
The downsampling block halves the height and width of the input, and increases the number of channels. | A residual network ends with these layers, in order:
|
| Example Visualization |
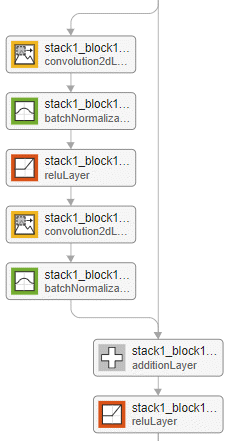
| Example of an initial residual block for a network without a bottleneck and with the batch normalization layer before the addition layer.
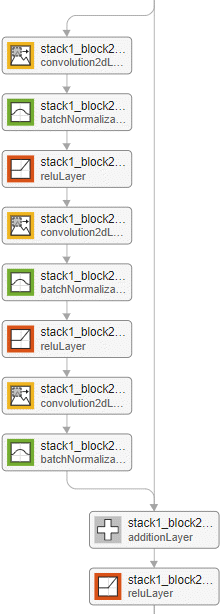
| Example of the standard residual block for a network with a bottleneck and with the batch normalization layer before the addition layer.
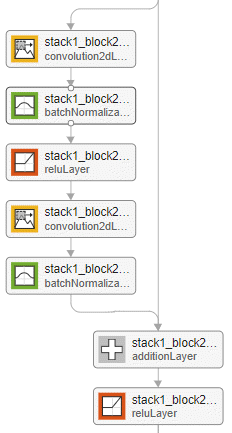
| Example of the standard residual block for a network without a bottleneck and with the batch normalization layer before the addition layer.
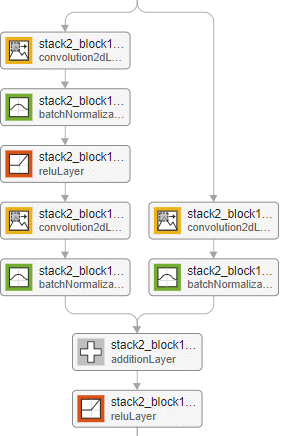
| Example of a downsampling residual block for a network without a bottleneck and with the batch normalization layer before the addition layer.
|
|

The convolution and fully connected layer weights are initialized using the He weight initialization method [3].
Tips
When working with small images, set the
InitialPoolingLayeroption to"none"to remove the initial pooling layer and reduce the amount of downsampling.Residual networks are usually named ResNet-X, where X is the depth of the network. The depth of a network is defined as the largest number of sequential convolutional or fully connected layers on a path from the network input to the network output. You can use this formula to compute the depth of your network:
where si is the depth of stack i.
References
[1] He, Kaiming, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. “Deep Residual Learning for Image Recognition.” Preprint, submitted December 10, 2015. https://arxiv.org/abs/1512.03385.
[2] He, Kaiming, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. “Identity Mappings in Deep Residual Networks.” Preprint, submitted July 25, 2016. https://arxiv.org/abs/1603.05027.
[3] He, Kaiming, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. "Delving Deep into Rectifiers: Surpassing Human-Level Performance on ImageNet Classification." In Proceedings of the 2015 IEEE International Conference on Computer Vision, 1026–34. Washington, DC: IEEE Computer Vision Society, 2015.
Version History
Introduced in R2024a