次世代型の SimMechanics によるマルチボディ システムのシミュレーション
本Webセミナーでは、SimMechanicsを使った、マルチボディダイナミクスのモデリング、シミュレーションの方法について、デモを交えて説明します。
SimMechanicsによる具体的なモデリング方法としては、ボディー(剛体)、ジョイント(並進・回転)、拘束、力・トルクを表す、メカ部品を組み合わせて、マルチボディシステムを構築します。SimMechanicsによるマルチボディシステムのアプリケーション適用例としては、ロボット、サスペンション、建設機械、ランディングギアなどが挙げられます。
本Webセミナーでは、このSimMechanicsに焦点を当て、次の内容についてデモを交えて説明します。
- SimMechanicsのモデリング方法
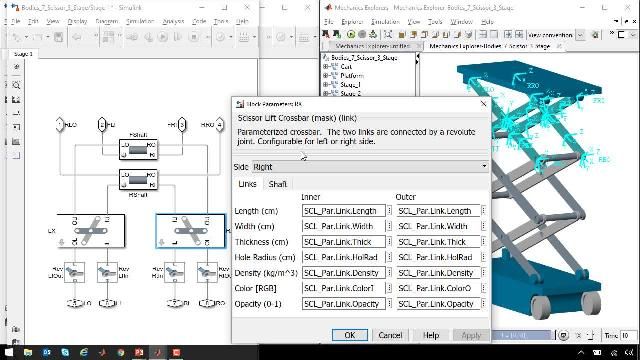
ボディー、ジョイントを組み合わせて、マルチボディシステムをモデリングする。 - 再利用しやすいメカ部品の作成方法
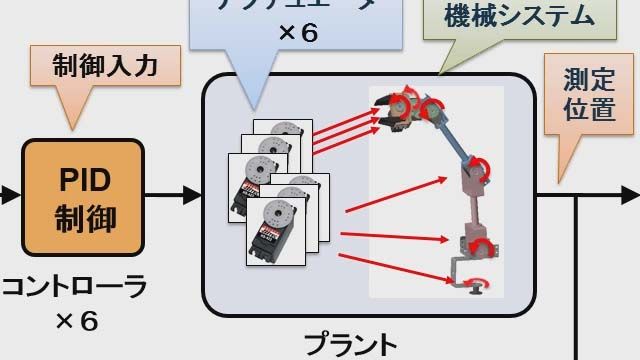
他のメカシステムでも再利用しやすいように、独自のメカ部品を作成してモジュール化する。 - 制御とマルチボディシステムとの連携
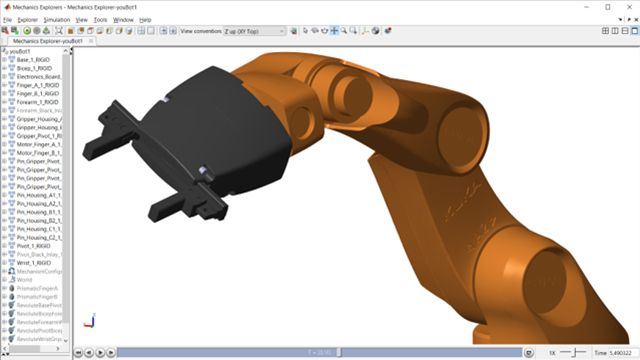
Simulinkで作成したコントローラモデルと組み合わせて、SimMechanicsで作成したマルチボディシステムの挙動をシミュレーションする。 - マルチボディシステムの3Dアニメーション
SimMechanicsで作成したマルチボディシステムのシミュレーション結果を、3Dアニメーション機能で可視化する。
このWebセミナーをきっかけとして、お客様の製品開発に、ぜひ次世代型のSimMechanics(SimMechanics 2nd Generation)をご活用頂ければ幸いです。
参加対象者:
- 次世代型 SimMechanics の使い方に関心のある方
- マルチボディシステムのモデリングに興味のある方
- 制御設計ツールのSimulink環境上でマルチボディシステムのシミュレーションをされたい方
録画: 2012 年 11 月 20 日