【実践】ブラックボックスで適応MPCを設計するオンラインモデル推定の手法
今回の動画シリーズにおいて、次の内容を紹介します。
- MPCの設計課題
- PID制御で制御する場合の問題点
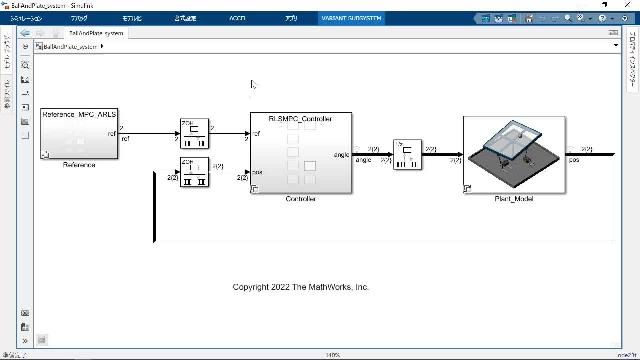
- MPCの内部モデルをブラックボックスで設計する方法
- 内部モデルを逐次推定する、オンライン推定型の適応MPCを設計する方法
- 指令値軌道に対して遅れなく追従するためのMPCの設計方法
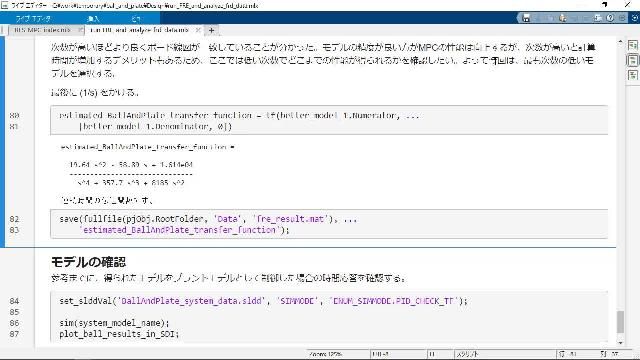
- むだ時間を含むプラントモデルに対してMPCを設計する方法
- 設計したMPCをCコード生成して実装し、PILを行う方法
今回の動画シリーズにおける、MPCの設計課題について説明します。またPID制御で制御する場合の問題点についても紹介します。
MPCの内部モデルをブラックボックスで設計する方法について詳細に説明します。
内部モデルを逐次推定する、オンライン推定型の適応MPCを設計する方法について紹介します。
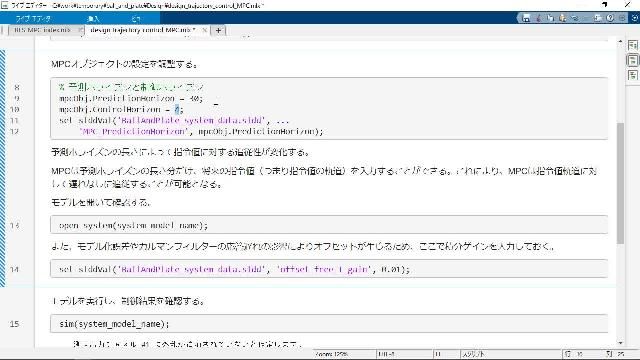
指令値軌道に対して遅れなく追従するためのMPCの設計方法について紹介します。
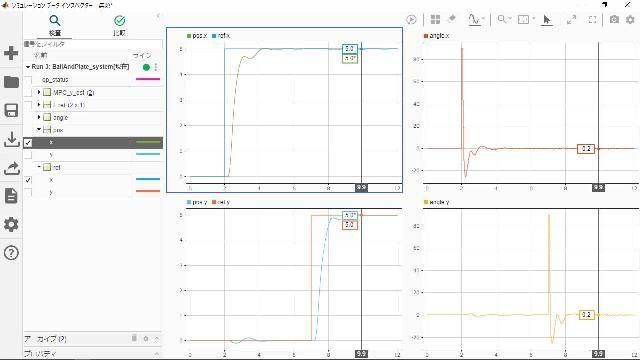
むだ時間を含むプラントモデルに対してMPCを設計する方法について紹介します。
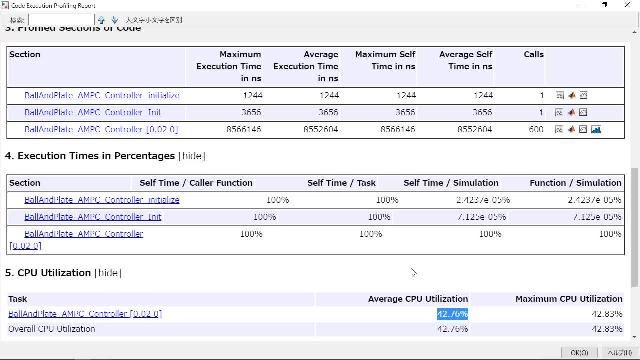
設計したMPCをCコード生成して実装し、PILを行う方法について紹介します。