advance
Advance UAV scenario simulation by one time step
Description
isrunning = advance(scene)scene by one time step. The
UpdateRate property of the uavScenario object
determines the time step during simulation. The function returns the running status of the
simulation. The function only updates a platform location if the platform has an assigned
trajectory.
Examples
Create a UAV scenario.
scene = uavScenario("UpdateRate",100,"StopTime",1);
Add the ground and a building as meshes.
addMesh(scene,"Polygon", {[-50 0; 50 0; 50 50; -50 50], [-3 0]}, [0.3 0.3 0.3]); addMesh(scene,"Cylinder", {[10 5 5], [0 10]}, [1 1 0]);
Create a UAV platform with a specified waypoint trajectory in the scenario. Define the mesh for the UAV platform.
traj = waypointTrajectory("Waypoints", [0 -20 -5; 20 0 -5], "TimeOfArrival", [0 1]); uavPlat = uavPlatform("UAV",scene,"Trajectory", traj); updateMesh(uavPlat,"quadrotor",{10},[1 0 0],eul2tform([0 0 0]));
Simulate and visualize the scenario.
setup(scene); while advance(scene) show3D(scene); drawnow update end
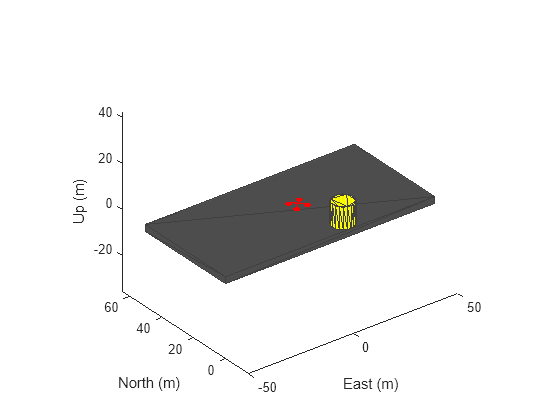
restart(scene);
Input Arguments
Output Arguments
Version History
Introduced in R2020b