Stepper Motor Drive
This example shows a model of a hybrid stepper motor drive.
Hoang Le-Huy, Laval University
Description
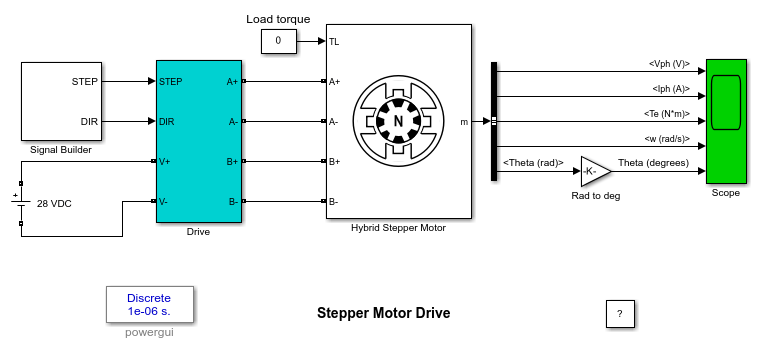
This example presents a stepper motor drive using the Hybrid Two-Phase model selected among the options on the dialog window. The motors parameters are those of a small stepper motor (size 23). The motor phases are fed by two H-bridge MOSFET PWM converters. The DC bus is represent by a 28-V DC voltage source. The motor currents are independently regulated by two hysteresis-based controllers that generate the MOSFETs drive signals by comparing the measured currents with their references. The ripple in the current waveforms is controlled by the hysteresis band of the comparators. The switching frequency is variable and dependent on the motor parameters.
In this example, single-phase-on excitation scheme is used because of its simplicity. Square-wave current references are generated using the current amplitude and the step frequency parameters specified in the dialog window. The movement of the stepper drive is controlled by the STEP and DIR signals received from Signal Builder block.
Simulation
The current amplitude and the stepping rate are selected in the dialog mask to be 2A and 500 step/s, respectively. The STEP signal from the Signal Builder block controls the movement of the stepper drive. A positive value (1.0) will make the motor rotating and a zero value will stop the rotation. The DIR signal controls the rotation direction. A positive value (1.0) will impose the positive direction while a zero value will impose the reverse direction. The stepper motor drive operation is illustrated by the main waveforms (voltages, currents, torque, speed and position) displayed on the Scope block. The simulation is done using a fixed-step solver with a sampling time of 1 us, providing acceptable accuracy for the PWM. If a high PWM accuracy is required, a smaller time step can be used but the simulation will be slower.
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)