SM Velocity Control
This example shows how to control the rotor angular velocity in a synchronous machine (SM) based electrical-traction drive. A high-voltage battery feeds the SM through a controlled three-phase converter for the stator windings and a controlled four quadrant chopper for the rotor winding. An ideal torque source provides the load. The Control subsystem includes a multi-rate PI-based cascade control structure which has an outer angular-velocity-control loop and three inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The Visualization subsystem contains scopes that allow you to see the simulation results.
Model

Simulation Results from Simscape Logging
This plot shows the requested and measured speed for the test, as well as the phase currents in the electric drive.

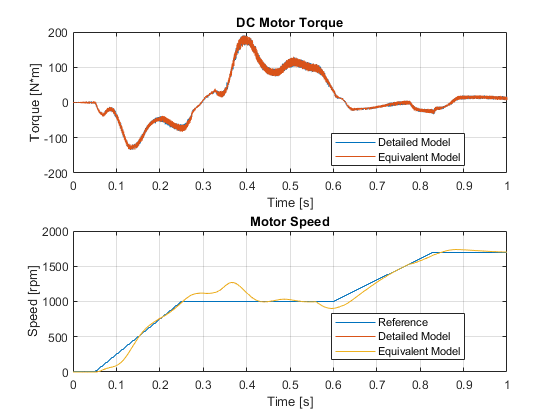
Compare Simulation Results of Detailed and Equivalent Models
This plot shows and compares the results obtained simulating the detailed and equivalent models of the Four-Quadrant Chopper and Three-Phase Converter blocks.
See Also
Simscape Blocks
- Synchronous Machine Salient Pole | Converter (Three-Phase) | Six-Pulse Gate Multiplexer | Four-Quadrant Chopper | Four-Pulse Gate Multiplexer
Blocks
- PWM Generator | PWM Generator (Three-phase, Two-level) | SM Current Reference Generator | SM Current Controller | Park Transform | Inverse Park Transform