Model a Multibody System in MATLAB
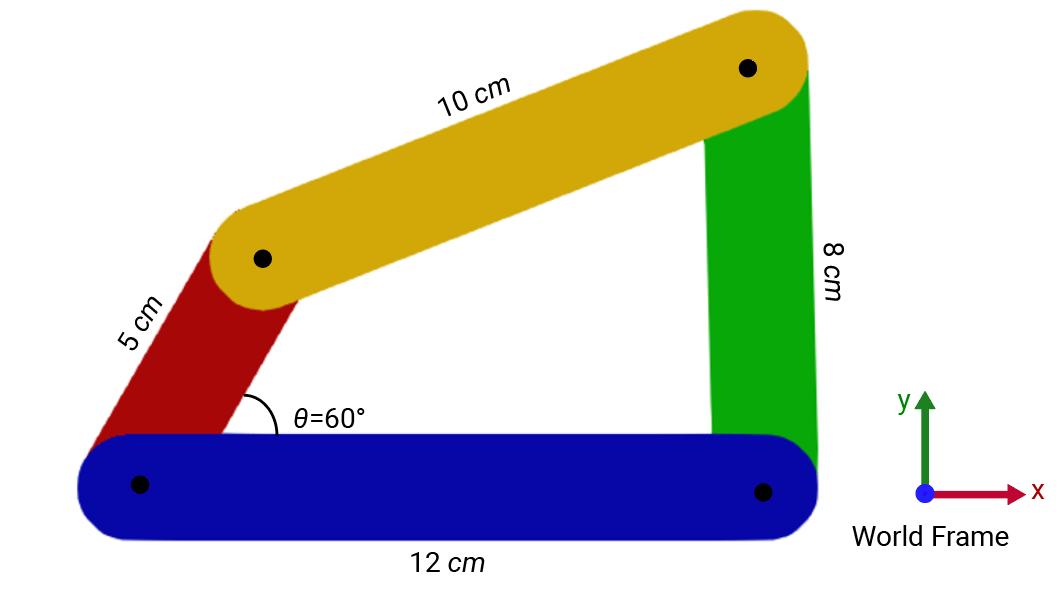
This example shows how to model a four-bar system using the MATLAB classes of Simscape Multibody. In this example, you create a crank-rocker mechanism that has four links measuring 5 cm, 8 cm, 10 cm, and 12 cm in length.
To avoid typing the namespace name for the classes, use the import function.
import simscape.Value simscape.op.* simscape.multibody.*;
Create a Four-Bar System
First, create a simscape.multibody.Multibody object to represent the four-bar system and name the object fb. A Multibody object is a hierarchical container that includes any type of component object. Each component object represents a part or a subsystem of the multibody system.
fb = Multibody
fb =
Multibody:
No connectors.
No components.
No connections.
Multibody with properties:
ComponentNames: [0×1 string]
Gravity: [0 0 -9.8066] (m/s^2)
DoVisualize: 1
FrameConnectors: [0×1 string]
The object is empty and has zero connectors.
Next, create the links and joints for the four-bar system. Each link of the four-bar system is a rigid body that has two end frame connectors and a reference frame located at the centroid of the body.
To construct links, use the helper function link. The first two arguments define the length and color of the link, and the third argument defines whether to add a connector to the local reference frame. If the third argument is true, the reference frame of the link becomes a frame connector that can connect to other frames or components. The function uses hard-coded values to set the width and height of the link to 2 cm and 1 cm, respectively. For detailed instructions on constructing the link in MATLAB, see the Model a Rigid Body in MATLAB.
First, specify the length and color of each link according to the illustration. Use the simscape.Value object and three-element [R G B] vectors to define the length and color of each link.
bottomLength = Value(12,"cm"); topLength = Value(10,"cm"); leftLength = Value(5,"cm"); rightLength = Value(8,"cm"); bottomColor = [0 0 .8]; topColor = [1 .8 0]; leftColor = [.8 0 0]; rightColor = [0 .8 0];
Open the model and use the helper function link with the specified link lengths and colors. Because the reference frame of the bottom link in the four-bar system connects to the world frame, the reference frame must be a frame connector. To expose the reference frame of the bottom link as a frame connector, set the third argument for the bottom link to true.
Bottom_Link = link(bottomLength,bottomColor,true); Top_Link = link(topLength,topColor,false); Left_Link = link(leftLength,leftColor,false); Right_Link = link(rightLength,rightColor,false);
Add the created links to the four-bar system by using the addComponent method.
addComponent(fb,"Bottom_Link",Bottom_Link); addComponent(fb,"Top_Link",Top_Link); addComponent(fb,"Left_Link",Left_Link); addComponent(fb,"Right_Link",Right_Link);
Add the world frame to the four-bar system by using the addComponent method, and connect the reference frame of the bottom link to the world frame by using the connect method.
addComponent(fb,"World",WorldFrame); connect(fb,"World/W","Bottom_Link/reference");
To assemble the links into the four-bar system, use four revolute joints. To create these joints, use the simscape.multibody.RevoluteJoint class. Name the joints based on their locations and add them to the four-bar system using the addComponent method.
joint = RevoluteJoint; addComponent(fb,"Bottom_Right_Joint",joint); addComponent(fb,"Top_Left_Joint",joint); addComponent(fb,"Top_Right_Joint",joint); addComponent(fb,"Bottom_Left_Joint",joint);
Connect the links using the revolute joints via the connectVia method.
connectVia(fb,"Bottom_Left_Joint","Bottom_Link/neg_end","Left_Link/neg_end"); connectVia(fb,"Bottom_Right_Joint","Bottom_Link/pos_end","Right_Link/neg_end"); connectVia(fb,"Top_Left_Joint","Top_Link/neg_end","Left_Link/pos_end"); connectVia(fb,"Top_Right_Joint","Top_Link/pos_end","Right_Link/pos_end");
By default, gravity aligns with the negative z-direction of the world frame. In this example, the four-bar system moves on the X-Y plane of the world frame, so gravity must align with the negative y-direction. Reorient the gravity for the four-bar system.
fb.Gravity = circshift(fb.Gravity,-1);
To set the initial configuration for the four-bar system, specify a target for a joint primitive. For example, you can set the joint primitive target of the bottom-left joint to 60 degrees by using a simscape.op.OperatingPoint object and a simscape.op.Target.
JointOP = OperatingPoint; JointOP("Bottom_Left_Joint/Rz/q") = Target(60,"deg","High")
JointOP = OperatingPoint with children: OperatingPoints: ChildId Size ___________________ ____ 'Bottom_Left_Joint' 1x1
When setting the targets of the joint primitives, you can use the jointPrimitivePaths method to display the paths of primitives in a Multibody object.
Check the components and structure of the system.
fb
fb =
Multibody:
No connectors.
Components:
Name Type
____________________ ______________
"Bottom_Left_Joint" Revolute Joint
"Bottom_Link" Rigid Body
"Bottom_Right_Joint" Revolute Joint
"Left_Link" Rigid Body
"Right_Link" Rigid Body
"Top_Left_Joint" Revolute Joint
"Top_Link" Rigid Body
"Top_Right_Joint" Revolute Joint
"World" World Frame
Connections:
Connector 1 Connector 2
_______________________ ______________________
"Bottom_Left_Joint/B" "Bottom_Link/neg_end"
"Bottom_Left_Joint/F" "Left_Link/neg_end"
"Bottom_Link/pos_end" "Bottom_Right_Joint/B"
"Bottom_Link/reference" "World/W"
"Bottom_Right_Joint/F" "Right_Link/neg_end"
"Left_Link/pos_end" "Top_Left_Joint/F"
"Right_Link/pos_end" "Top_Right_Joint/F"
"Top_Left_Joint/B" "Top_Link/neg_end"
"Top_Link/pos_end" "Top_Right_Joint/B"
Multibody with properties:
ComponentNames: [9×1 string]
Gravity: [0 -9.8066 0] (m/s^2)
DoVisualize: 1
FrameConnectors: [0×1 string]
Create a Simulink Model
To fully use the capabilities in Simscape Multibody, including the ability to simulate of multibody systems, create a Simulink model from the fb object by using the makeBlockDiagram method.
When you construct a multibody system in MATLAB, Simscape Multibody uses a different approach to specify the state of the joint primitives. Instead of specifying the state through joint targets in joint blocks, the fb object uses the simscape.op.OperatingPoint object, JointOP, to define state targets for joint primitives. Therefore, to create a Simulink model from the fb object, the makeBlockDiagram method requires the JointOP and fb objects. The makeBlockDiagram method uses the data in the JointOP object to populate the joint target parameters for the joint blocks of the generated Simulink model.
makeBlockDiagram(fb,JointOP,"FourBar")You can modify the FourBar model just like any Simulink model. However, a best practice is to avoid making changes in the FourBar model that you can also make in the fb object. Instead, make the changes in the code that generates the fb object, regenerate the object, and then create a new Simulink model. This approach ensures that the code remains the primary source for the model.
See Also
simscape.multibody.Component | simscape.multibody.Multibody | simscape.multibody.Joint