Improve PID Design to Handle Plant Constraints
Many real-world systems operate under physical or safety constraints such as actuator saturation, rate limits, or state boundaries. Standard PID controllers do not inherently handle such constraints. If you do not properly account for constraints in the control design, they can lead to degraded performance or even unsafe behavior.
This topic provides an overview of strategies you can use to ensure safe and efficient controller performance under physical and operational constraints, including anti-windup mechanisms, safety filters such as control barrier functions (CBFs) and passivity enforcement, and advanced predictive control methods like model predictive control (MPC). These approaches either modify control actions to respect actuator and state limits or incorporate constraints directly into the control design to maintain stability and safety without sacrificing performance.
How Constraints Affect PID Performance
These constraints can lead to:
Integrator Windup — When actuators saturate, the integral term in a PID controller can accumulate error excessively, causing overshoot or instability once the actuator is back within range.
Violation of Safety Limits — Without constraint handling, the controller may drive the system into unsafe or undesirable states.
Suboptimal Performance — Ignoring constraints can result in sluggish or overly aggressive control actions that compromise efficiency or comfort.
Overview of Techniques
Use this table to pick an approach based on your plant knowledge, constraints, and tolerance for control structure changes.
| Solutions | How it Works | Advantages | Risks | When to Use | Typical Applications |
|---|---|---|---|---|---|
| ★Augment with Control Barrier Function Blocks | Enforce safety constraints by restricting control inputs to maintain system states within a safe set. | Formal safety guarantees, compatible with other controllers (QP formulation). | May conflict with performance objectives, requires accurate constraint modeling. | When safety-critical operation is essential and constraints must always be respected. | Autonomous driving, robotic safety constraints. |
| Implement Anti-Windup for Actuator Saturation | Prevents integral term from accumulating error when actuators saturate. | Simple; built into PID blocks. | Incorrect tuning can cause sluggish recovery or oscillations. | When actuator limits are known and saturation occurs frequently. | Drives, process control, robotics. |
| Augment with Constraint Enforcement Block | Enforce safety constraints by restricting control inputs to maintain system states within a safe set. | Simple; enforce general-purpose constraints. | May conflict with performance objectives; requires accurate constraint modeling. | When states must remain within safety bounds. | Safety‑critical systems, robotics. |
| Augment with Passivity Enforcement Block | Uses passivity/dissipative properties to design controllers ensuring stability via energy shaping. | Strong stability guarantees, modularity (interconnections preserve passivity). | May be conservative. | When interconnection stability is critical (e.g., multi-agent, networked, energy systems). | Power systems, teleoperation, mechanical systems. |
| Replace PID with Model Predictive Control | Predicts outputs with disturbance/noise models and solves QP to optimize control subject to constraints. | Handles constraints explicitly; multivariable; band‑limited disturbance shaping. | Requires models and QP solver; more complex; computational cost. | When constraints and multivariable interactions are critical. | Process control, constrained systems, MIMO with delays. |
Implement Anti-Windup for Actuator Saturation
You can use built-in output saturation with anti-windup from PID controller block to prevent integrator windup when actuators hit saturation limits.
When to use — Actuator limits are known and saturation occurs frequently.
How to use — Enable built-in saturation in the PID controller block and configure the anti-windup method (back-calculation gain or clamping).
Examples
Additional Resources
PID Controller (block reference)
Anti-windup for PID control (Tech Talk)
Anti-windup for PID control
Augment with Safety Filters
Use safety filters such as CBF and Passivity to guarantee such constraints are enforced by the filtered control action.
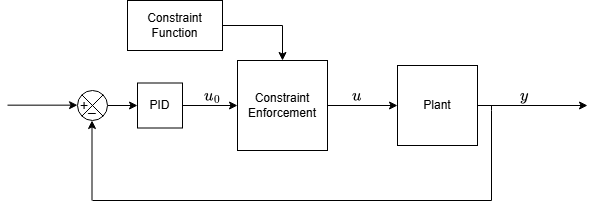
Constraint Enforcement Block
Enforce constraints specified as a function of system states
When to use — Safety‑critical systems where states must remain within bounds.
How to use — Insert block after PID output to compute modified control actions that are closest to specified control actions subject to constraints and action bounds.
Architecture — This figure shows a typical way of implementing Constraint Enforcement block to modify PID controller actions.
Examples
Additional Resources
Constraint Enforcement (block reference)
Constraint Enforcement for Control Design (concept reference)
Constraint Enforcement for Improved Safety (Tech Talk)
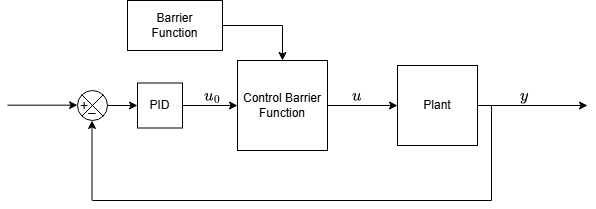
Control Barrier Function and High-Order Control Barrier Function Blocks
Define safety set of the desired states of a system using control barrier functions such that the states remain in a safety set.
When to use — When the system states must stay within a safety set and smooth control actions are required.
How to use — Insert block after PID output to compute modified control actions that are closest to specified control actions subject to constraints and action bounds. Use control barrier functions to guarantee safety by specifying a safety set for system states.
Architecture — This figure shows a typical way of implementing Control Barrier Function blocks to modify PID controller actions.
Examples
Additional Resources
Control Barrier Function (block reference)
High-Order Control Barrier Function (block reference)
Enforce Safety Constraints with Control Barrier Functions (concept reference)
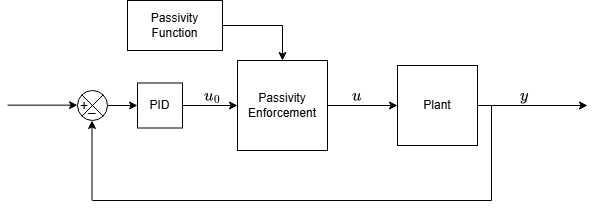
Passivity Enforcement Block
Enforce passivity on a closed loop system by modifying control actions such that system dissipates energy over time
When to use — You want to enforce passivity on a closed-loop system by modifying control actions such that system dissipates energy over time
How to use — Insert block after PID output to compute modified control actions that are closest to specified control actions subject to passivity constraints. Define constraints in the form of passivity input and output functions.
Architecture — This figure shows a typical way of implementing Passivity Enforcement blocks to modify PID controller actions.
Examples
Additional Resources
Passivity Enforcement (block reference)
Passivity Enforcement for Control Design (concept reference)
Replace PID with Model Predictive Control
A model predictive controller uses linear plant, disturbance, and noise models to estimate the controller state and predict future plant outputs. Using the predicted plant outputs, the controller solves a constrained optimization problem to determine optimal manipulated variable adjustments. The most common MPC constraints are bounds on single inputs or outputs, however, you can also introduce (and update at run time) mixed input/output linear constraints.
For more information, see MPC Controller (Model Predictive Control Toolbox), What Is Model Predictive Control? (Model Predictive Control Toolbox), and Specify Constraints (Model Predictive Control Toolbox). For examples, see DC Servomotor with Constraint on Unmeasured Output (Model Predictive Control Toolbox), Constraints on Linear Combinations of Inputs and Outputs (Model Predictive Control Toolbox), and Use Custom Constraints in Blending Process (Model Predictive Control Toolbox).