Estimate Frequency Response with Linearization-Based Input Using Model Linearizer
When you have a linear model representing the portion of your Simulink® model that you want to estimate, you can use that model to generate the input signal. This alternative to manually specifying the estimation signal (as shown in Estimate Frequency Response Using Model Linearizer) can be useful when you are using frequency response estimation to validate a model obtained through linearization. This example shows how to perform frequency response estimation in Model Linearizer using an input signal that is based on the dynamics of an exact linearization of the model.
Linearize Simulink Model
In this example, linearize a Simulink model to obtain the linear model you use to generate the estimation input signal.
Open the Simulink model.
openExample("scdDCMotor")
This model contains predefined linear analysis points. There is an input point at the compensator output and an open-loop output after the unit gain block. The response from the defined input to the defined output is the response of the inner loop of the model, with the outer loop open.
In the Simulink model window, in the Apps gallery, click Model Linearizer.
Linearize the model using the predefined analysis points and using the model initial conditions as the operating point.
On the Linear Analysis tab, click
 Bode.
Bode.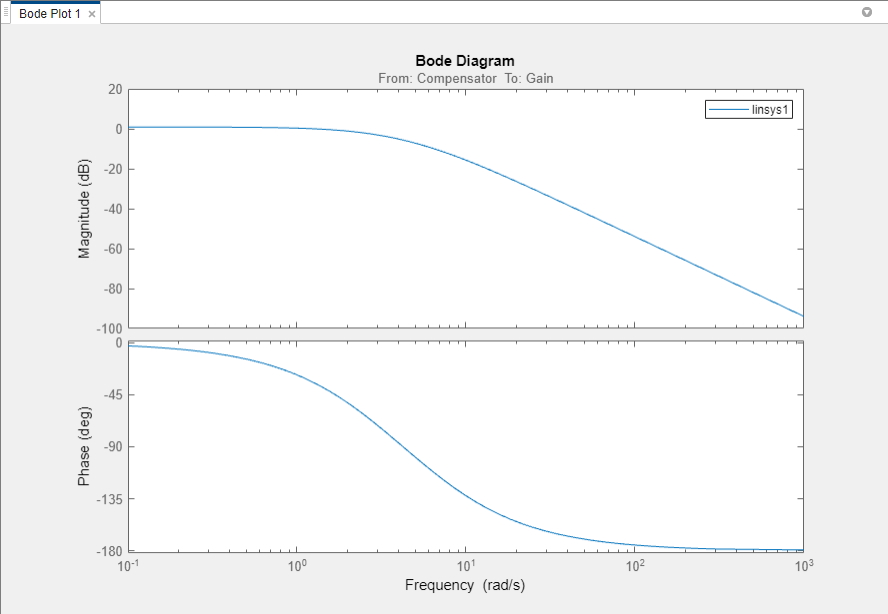
A new linearized model,
linsys1, appears in the Linear Analysis Workspace.
Create Sinestream Input Signal
On the Estimation tab, in the Input Signal drop-down list, select
Sinestream.Initialize the input signal frequencies and parameters based on
linsys1.In the Create sinestream input dialog box, in the System drop-down list, select
linsys1. Iflinsys1does not appear in the list, click Refresh.
Click Initialize frequencies and parameters
The frequency content viewer is populated with frequency points. The software chooses the frequencies and input signal parameters automatically based on the dynamics of
linsys1. The software also automatically initializes other parameters of the sinestream signal, including:Amplitude
Number of periods
Settling periods
Ramp periods
Number of samples at each period
Select all the frequency points.

Specify the amplitude of the input signal.
Enter
1in the Amplitude box.Create the input sinestream signal.
Click OK. The input signal
in_sine1appears in the Linear Analysis Workspace.
Estimate Frequency Response
Click ![]() Bode Plot 1 to estimate the frequency response.
Bode Plot 1 to estimate the frequency response.

The estimated system, estsys1, appears in the Linear
Analysis Workspace and the its frequency response is added to Bode
Plot 1.
The frequency response for the estimated model matches that of the linearized model. You can use this approach to validate an exact linearization.