Align Signals with Different Start Times
Many measurements involve data collected asynchronously by multiple sensors. If you want to integrate the signals, you have to synchronize them. The Signal Processing Toolbox™ has functions that let you do just that.
For example, consider a car crossing a bridge. The vibrations it produces are measured by three identical sensors located at different spots. The signals have different arrival times.
Load the signals into the MATLAB® workspace and plot them.
load relatedsig ax(1) = subplot(3,1,1); plot(s1) ylabel('s_1') ax(2) = subplot(3,1,2); plot(s2) ylabel('s_2') ax(3) = subplot(3,1,3); plot(s3) ylabel('s_3') xlabel('Samples') linkaxes(ax,'x')
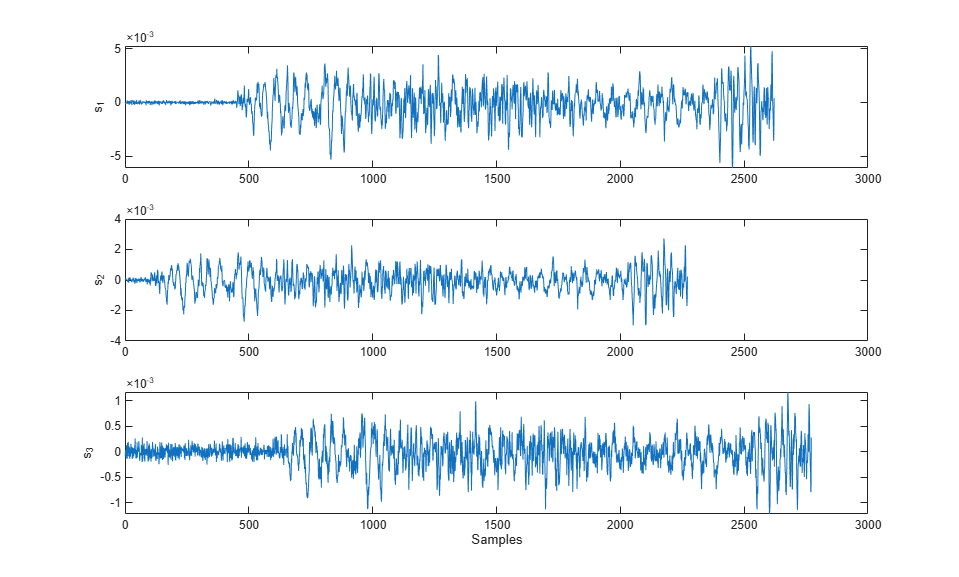
Signal s1 lags s2 and in turn leads s3. The delays can be computed exactly using finddelay. You see that s2 leads s1 by 350 samples, s3 lags s1 by 150 samples, and s2 leads s3 by 500 samples.
t21 = finddelay(s2,s1) t31 = finddelay(s3,s1) t32 = finddelay(s2,s3)
t21 = 350 t31 = -150 t32 = 500
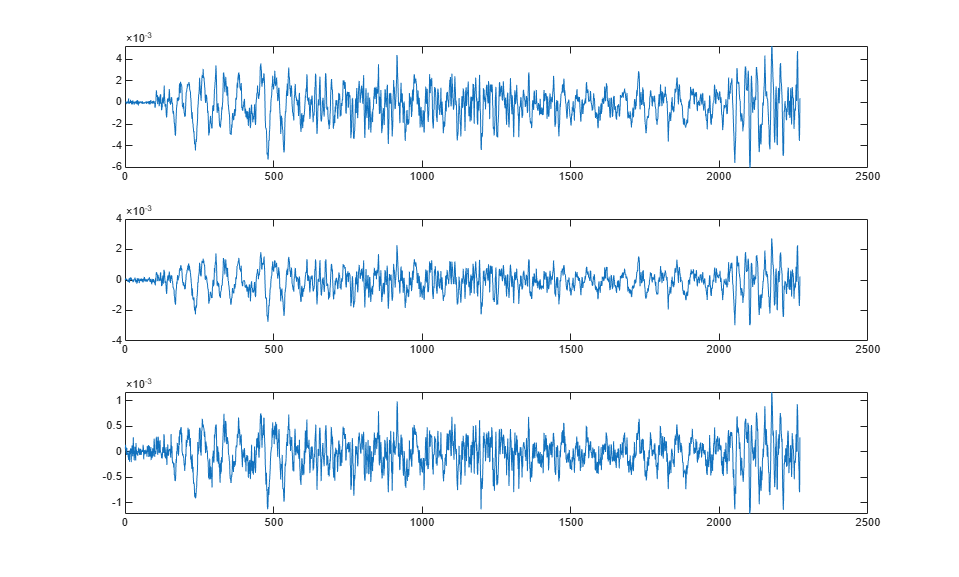
Line up the signals by leaving the earlier signal untouched and clipping the delays out of the other vectors. Add 1 to the lag differences to account for the one-based indexing used by MATLAB®. This method aligns the signals using as reference the earliest arrival time, that of s2.
axes(ax(1)) plot(s1(t21+1:end)) axes(ax(2)) plot(s2) axes(ax(3)) plot(s3(t32+1:end))
Use alignsignals to align the signals. The function works by delaying earlier signals, so use as reference the latest arrival time, that of s3.
[x1,x3] = alignsignals(s1,s3); x2 = alignsignals(s2,s3); axes(ax(1)) plot(x1) axes(ax(2)) plot(x2) axes(ax(3)) plot(x3)
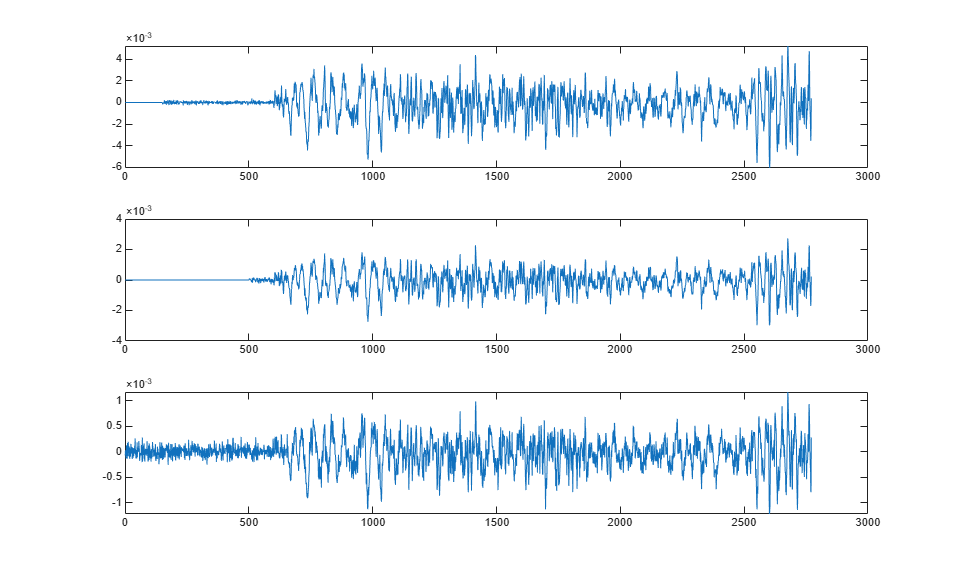
The signals are now synchronized and ready for further processing.
See Also
alignsignals | finddelay | xcorr