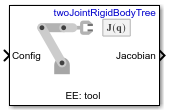
Get Jacobian
Geometric Jacobian for robot configuration
Libraries:
Robotics System Toolbox /
Manipulator Algorithms
Description
The Get Jacobian block returns the geometric Jacobian relative to the
base for the specified end effector at the given configuration of a rigidBodyTree robot model.
The Jacobian maps the joint-space velocity to the end-effector velocity relative to the base coordinate frame. The end-effector velocity equals:
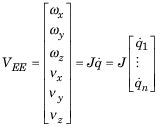
ω is the angular velocity, υ is the linear
velocity, and ![]() is the joint-space velocity.
is the joint-space velocity.
Examples

Compute Geometric Jacobian for Manipulators in Simulink
Compute geometric Jacobian for robot manipulators using a rigid body tree robot model passed to manipulator algorithm blocks in Simulink®.
Ports
Input
Output
Geometric Jacobian of the end effector with the specified configuration, Config, returned as a 6-by-n matrix, where n is the number of degrees of freedom of the end effector. The Jacobian maps the joint-space velocity to the end-effector velocity relative to the base coordinate frame. The end-effector velocity equals:
ω is the angular velocity, υ is
the linear velocity, and ![]() is the joint-space velocity.
is the joint-space velocity.
Parameters
Extended Capabilities
Version History
Introduced in R2018a
See Also
Blocks
- Get Transform | Forward Dynamics | Inverse Dynamics | Gravity Torque | Joint Space Mass Matrix | Velocity Product Torque