tune
Syntax
Description
tunedMeasureNoise = tune(filter,measureNoise,sensorData,groundTruth)AdditiveProcessNoise property of the
insEKF filter object filter, and the measurement
noise, to reduce the root-mean-squared (RMS) state estimation error between the fused sensor
data and the ground truth. The function also returns the tuned measurement noise
tunedMeasureNoise. The function uses the property values in the
filter and the measurement noise provided in the measureNoise structure
as the initial estimate for the optimization algorithm.
tunedMeasureNoise = tune(___,config)tunerconfig object
config, in addition to all input arguments from the previous syntax.
Examples
Load the recorded sensor data and ground truth data.
load("accelGyroINSEKFData.mat");Create an insEKF filter object. Specify the orientation part of the state in the filter using the initial orientation from the measurement data. Specify the diagonal elements of the state estimate error covariance matrix corresponding to the orientation state as 0.01.
filt = insEKF; stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2);
Obtain a representative measurement noise structure and use it to estimate states before tuning.
mnoise = tunernoise(filt); untunedEst = estimateStates(filt,sensorData,mnoise);
Reinitialize the filter, set up a tunerconfig object, and tune the filter.
stateparts(filt,"Orientation",compact(initOrient)); statecovparts(filt,"Orientation",1e-2); cfg = tunerconfig(filt,MaxIterations=10,ObjectiveLimit=1e-4); tunedmn = tune(filt,mnoise,sensorData,groundTruth,cfg);
Iteration Parameter Metric
_________ _________ ______
1 AdditiveProcessNoise(1) 0.3787
1 AdditiveProcessNoise(15) 0.3761
1 AdditiveProcessNoise(29) 0.3695
1 AdditiveProcessNoise(43) 0.3655
1 AdditiveProcessNoise(57) 0.3533
1 AdditiveProcessNoise(71) 0.3446
1 AdditiveProcessNoise(85) 0.3431
1 AdditiveProcessNoise(99) 0.3428
1 AdditiveProcessNoise(113) 0.3427
1 AdditiveProcessNoise(127) 0.3426
1 AdditiveProcessNoise(141) 0.3298
1 AdditiveProcessNoise(155) 0.3206
1 AdditiveProcessNoise(169) 0.3200
1 AccelerometerNoise 0.3199
1 GyroscopeNoise 0.3198
2 AdditiveProcessNoise(1) 0.3126
2 AdditiveProcessNoise(15) 0.3098
2 AdditiveProcessNoise(29) 0.3018
2 AdditiveProcessNoise(43) 0.2988
2 AdditiveProcessNoise(57) 0.2851
2 AdditiveProcessNoise(71) 0.2784
2 AdditiveProcessNoise(85) 0.2760
2 AdditiveProcessNoise(99) 0.2744
2 AdditiveProcessNoise(113) 0.2744
2 AdditiveProcessNoise(127) 0.2743
2 AdditiveProcessNoise(141) 0.2602
2 AdditiveProcessNoise(155) 0.2537
2 AdditiveProcessNoise(169) 0.2527
2 AccelerometerNoise 0.2524
2 GyroscopeNoise 0.2524
3 AdditiveProcessNoise(1) 0.2476
3 AdditiveProcessNoise(15) 0.2432
3 AdditiveProcessNoise(29) 0.2397
3 AdditiveProcessNoise(43) 0.2381
3 AdditiveProcessNoise(57) 0.2255
3 AdditiveProcessNoise(71) 0.2226
3 AdditiveProcessNoise(85) 0.2221
3 AdditiveProcessNoise(99) 0.2202
3 AdditiveProcessNoise(113) 0.2201
3 AdditiveProcessNoise(127) 0.2201
3 AdditiveProcessNoise(141) 0.2090
3 AdditiveProcessNoise(155) 0.2070
3 AdditiveProcessNoise(169) 0.2058
3 AccelerometerNoise 0.2052
3 GyroscopeNoise 0.2052
4 AdditiveProcessNoise(1) 0.2051
4 AdditiveProcessNoise(15) 0.2027
4 AdditiveProcessNoise(29) 0.2019
4 AdditiveProcessNoise(43) 0.2000
4 AdditiveProcessNoise(57) 0.1909
4 AdditiveProcessNoise(71) 0.1897
4 AdditiveProcessNoise(85) 0.1882
4 AdditiveProcessNoise(99) 0.1871
4 AdditiveProcessNoise(113) 0.1870
4 AdditiveProcessNoise(127) 0.1870
4 AdditiveProcessNoise(141) 0.1791
4 AdditiveProcessNoise(155) 0.1783
4 AdditiveProcessNoise(169) 0.1751
4 AccelerometerNoise 0.1748
4 GyroscopeNoise 0.1747
5 AdditiveProcessNoise(1) 0.1742
5 AdditiveProcessNoise(15) 0.1732
5 AdditiveProcessNoise(29) 0.1712
5 AdditiveProcessNoise(43) 0.1712
5 AdditiveProcessNoise(57) 0.1626
5 AdditiveProcessNoise(71) 0.1615
5 AdditiveProcessNoise(85) 0.1598
5 AdditiveProcessNoise(99) 0.1590
5 AdditiveProcessNoise(113) 0.1589
5 AdditiveProcessNoise(127) 0.1589
5 AdditiveProcessNoise(141) 0.1517
5 AdditiveProcessNoise(155) 0.1508
5 AdditiveProcessNoise(169) 0.1476
5 AccelerometerNoise 0.1473
5 GyroscopeNoise 0.1470
6 AdditiveProcessNoise(1) 0.1470
6 AdditiveProcessNoise(15) 0.1470
6 AdditiveProcessNoise(29) 0.1463
6 AdditiveProcessNoise(43) 0.1462
6 AdditiveProcessNoise(57) 0.1367
6 AdditiveProcessNoise(71) 0.1360
6 AdditiveProcessNoise(85) 0.1360
6 AdditiveProcessNoise(99) 0.1350
6 AdditiveProcessNoise(113) 0.1350
6 AdditiveProcessNoise(127) 0.1350
6 AdditiveProcessNoise(141) 0.1289
6 AdditiveProcessNoise(155) 0.1288
6 AdditiveProcessNoise(169) 0.1262
6 AccelerometerNoise 0.1253
6 GyroscopeNoise 0.1246
7 AdditiveProcessNoise(1) 0.1246
7 AdditiveProcessNoise(15) 0.1244
7 AdditiveProcessNoise(29) 0.1205
7 AdditiveProcessNoise(43) 0.1203
7 AdditiveProcessNoise(57) 0.1125
7 AdditiveProcessNoise(71) 0.1122
7 AdditiveProcessNoise(85) 0.1117
7 AdditiveProcessNoise(99) 0.1106
7 AdditiveProcessNoise(113) 0.1104
7 AdditiveProcessNoise(127) 0.1104
7 AdditiveProcessNoise(141) 0.1058
7 AdditiveProcessNoise(155) 0.1052
7 AdditiveProcessNoise(169) 0.1035
7 AccelerometerNoise 0.1024
7 GyroscopeNoise 0.1014
8 AdditiveProcessNoise(1) 0.1014
8 AdditiveProcessNoise(15) 0.1012
8 AdditiveProcessNoise(29) 0.1012
8 AdditiveProcessNoise(43) 0.1005
8 AdditiveProcessNoise(57) 0.0948
8 AdditiveProcessNoise(71) 0.0948
8 AdditiveProcessNoise(85) 0.0938
8 AdditiveProcessNoise(99) 0.0934
8 AdditiveProcessNoise(113) 0.0931
8 AdditiveProcessNoise(127) 0.0931
8 AdditiveProcessNoise(141) 0.0896
8 AdditiveProcessNoise(155) 0.0889
8 AdditiveProcessNoise(169) 0.0867
8 AccelerometerNoise 0.0859
8 GyroscopeNoise 0.0851
9 AdditiveProcessNoise(1) 0.0851
9 AdditiveProcessNoise(15) 0.0850
9 AdditiveProcessNoise(29) 0.0824
9 AdditiveProcessNoise(43) 0.0819
9 AdditiveProcessNoise(57) 0.0771
9 AdditiveProcessNoise(71) 0.0771
9 AdditiveProcessNoise(85) 0.0762
9 AdditiveProcessNoise(99) 0.0759
9 AdditiveProcessNoise(113) 0.0754
9 AdditiveProcessNoise(127) 0.0754
9 AdditiveProcessNoise(141) 0.0734
9 AdditiveProcessNoise(155) 0.0724
9 AdditiveProcessNoise(169) 0.0702
9 AccelerometerNoise 0.0697
9 GyroscopeNoise 0.0689
10 AdditiveProcessNoise(1) 0.0689
10 AdditiveProcessNoise(15) 0.0686
10 AdditiveProcessNoise(29) 0.0658
10 AdditiveProcessNoise(43) 0.0655
10 AdditiveProcessNoise(57) 0.0622
10 AdditiveProcessNoise(71) 0.0620
10 AdditiveProcessNoise(85) 0.0616
10 AdditiveProcessNoise(99) 0.0615
10 AdditiveProcessNoise(113) 0.0607
10 AdditiveProcessNoise(127) 0.0606
10 AdditiveProcessNoise(141) 0.0590
10 AdditiveProcessNoise(155) 0.0578
10 AdditiveProcessNoise(169) 0.0565
10 AccelerometerNoise 0.0562
10 GyroscopeNoise 0.0557
Estimate states again, this time using the tuned filter.
tunedEst = estimateStates(filt,sensorData,tunedmn);
Compare the tuned and untuned estimates against the ground truth data.
times = groundTruth.Properties.RowTimes; duntuned = rad2deg(dist(untunedEst.Orientation,groundTruth.Orientation)); dtuned = rad2deg(dist(tunedEst.Orientation,groundTruth.Orientation)); plot(times,duntuned,times,dtuned); xlabel("Time (sec)") ylabel("Error (deg)") legend("Untuned","Tuned") title("Filter Orientation Error")
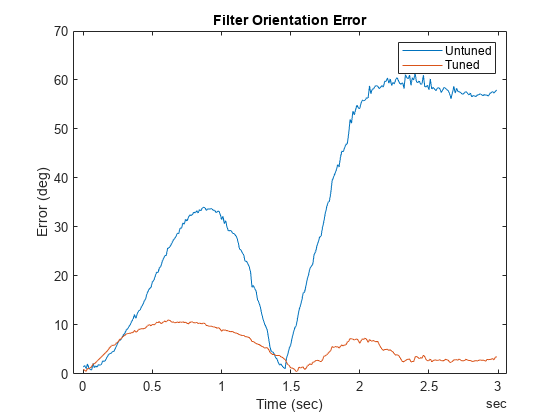
Print the root-mean-squared (RMS) error of both the untuned and the tuned filters.
untunedRMSError = sqrt(mean(duntuned.^2)); tunedRMSError = sqrt(mean(dtuned.^2)); fprintf("Untuned RMS error: %.2f degrees\n", ... untunedRMSError);
Untuned RMS error: 39.47 degrees
fprintf("Tuned RMS error: %.2f degrees\n", ... tunedRMSError);
Tuned RMS error: 6.39 degrees
Input Arguments
Output Arguments
References
[1] Abbeel, P., Coates, A., Montemerlo, M., Ng, A.Y. and Thrun, S. Discriminative Training of Kalman Filters. In Robotics: Science and systems, Vol. 2, pp. 1, 2005.
Version History
Introduced in R2022a
See Also
tunerconfig | tunernoise | predict | fuse | residual | correct | stateparts | statecovparts | stateinfo | estimateStates | createTunerCostTemplate | tunerCostFcnParam