Detect and Track Object Using Deep Learning on Raspberry Pi
This example shows how to use the Raspberry Pi® Blockset to deploy a deep learning algorithm that detects and tracks an object in Connected IO and PIL modes. This algorithm uses the ResNet-18-based YOLOv2 neural network to identify the object captured by the camera mounted on a servo motor and connected to the Raspberry Pi hardware. You can experiment with different objects in your surroundings to see how accurately the network detects images on the Raspberry Pi hardware.
Required Hardware
Raspberry Pi hardware (Model 4 recommended)
Supported USB webcam or Raspberry Pi camera module
Power adapter for the Raspberry Pi board
Servo motor
Jumper cable
Hardware Setup
Power the Raspberry Pi target board.
Connect the servo motor to the Raspberry Pi target board using the jumper cables. Connect the GND and VCC pins. Additionally, in this example, you connect the servo motor signal pin to the GPIO pin 12 of the Raspberry Pi target board.
Mount the camera on top of the servo motor using sticky tape or an adhesive. This example uses a USB web camera.
Create Tracker Object
Create the tracker object and obtain the ground truth data.
tracker = raspiObjectTracker
tracker =
raspiObjectTracker with properties:
BoardDetails: [1x1 struct]
Setup: [1x1 struct]
Detector: [1x1 struct]
TestAndProfile: [1x1 struct]View the Raspberry Pi target board details.
tracker.BoardDetails
ans =
struct with fields:
Name: 'Raspberry Pi'
DeviceAddress: '192.168.0.100'
UserName: 'pi'
Password: 'raspberry'This structure shows the name, device address, user name, and password of the Raspberry Pi board.
Note: You can change the values by using dot notation. For example, change the password to MATLAB using tracker.BoardDetails.Password = 'MATLAB'.
Check your change by viewing the properties again.
tracker.BoardDetails
ans =
struct with fields:
Name: 'Raspberry Pi'
DeviceAddress: '192.168.0.100'
UserName: 'pi'
Password: 'MATLAB'The structure shows the updated password.
View the image capture setup properties.
tracker.Setup
ans =
struct with fields:
DataCaptureTime: 120 CameraInterface: 'webcam'
This structure shows the type of interface and the capture time.
DataCaptureTime— Time duration in seconds for image capture of the tracked object. The default time is120seconds. You can change the values by using dot notation.
Note: You can increase the capture time to improve the training efficiency of the neural network when detecting and tracking an object. For example, to change the capture time to 300 seconds use tracker.Setup.DataCaptureTime = 300.
CameraInterface— Type of camera interface used to detect and track the object, which can be awebcamorcameraboardobject. The default interface iswebcam.
Place the object to detect and track in front of the camera and run this command at the MATLAB® Command Window:
objectTrackingSetup(tracker)
This command establishes an IO connection with the Raspberry Pi hardware and obtains the ground truth data from the webcam. It also opens the Video Labeler app.
The camera captures images for the time that you specify in the DataCaptureTime property. The app saves the images to a folder in the current working directory named Data-_date_-_timestamp_, where date is the current date and timestamp is the current time.
Copy one sample image from the Data-_date_-_timestamp_ folder and paste it in the current working directory. Note the file name so that you can use it as a reference image while training the network by setting the tracker.Detector.SampleImage property.
![]()
Running the objectTrackingSetup(tracker) command also opens the Video Labeler (Computer Vision Toolbox) app. This app allows you to mark the region of interest (ROI), automatically label across image frames using an automation algorithm, and export the labeled ground truth.
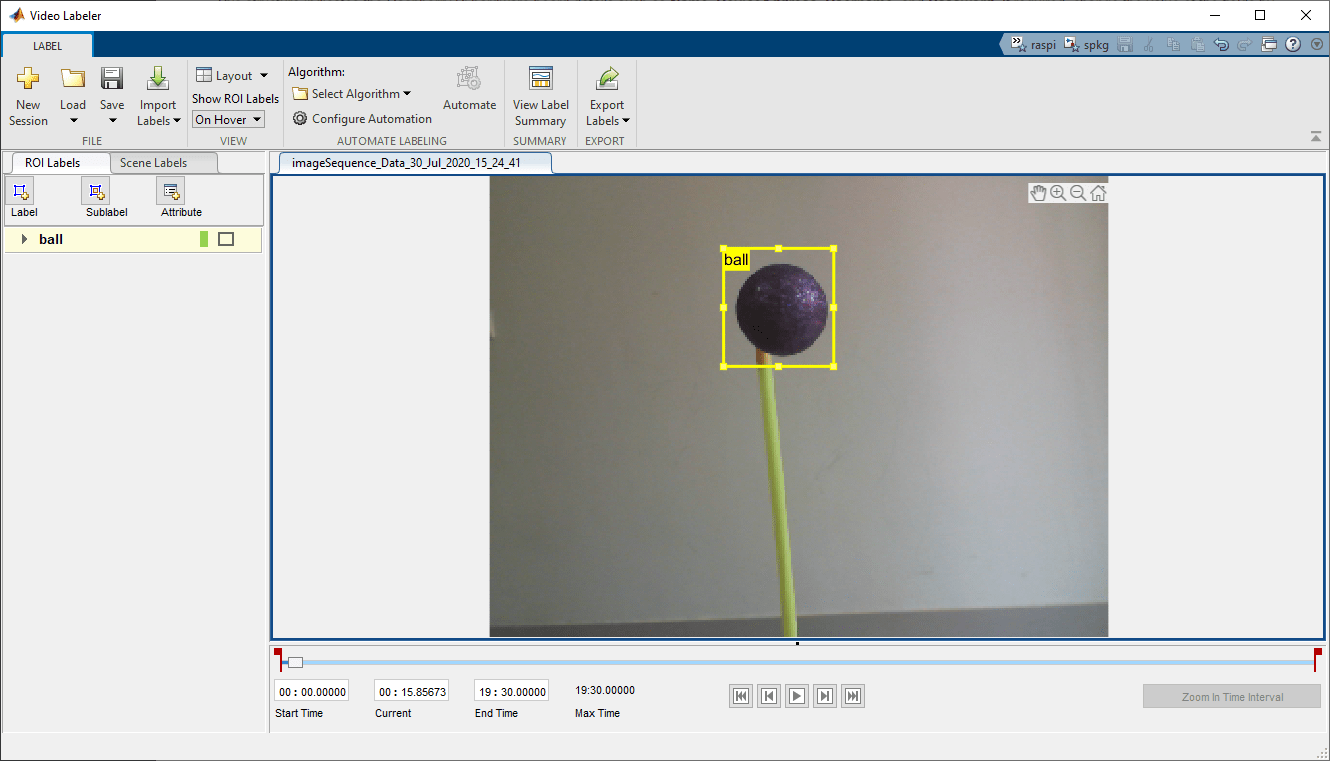
Follow these steps in the Video Labeler app:
In the ROI Labels pane, click Label. Create a Rectangular label, name it, and click OK. In this example, the object has the name
ball.Use the mouse to draw a rectangular ROI in the image.
In the Automate Labeling section, use the Select Algorithm button to select the
Point Trackeralgorithm and then click Automate. The algorithm instructions appear in the right pane, and the selected labels are available to automate.In the Run section, click Run to automate labeling for the image sequence.
When you are satisfied with the algorithm results, in the Close section, click Accept.
Under Export Labels, select To File to export the labeled data to a MAT file objectLabel.mat.
For detailed information on how to use the Video Labeler app, see Video Labeler (Computer Vision Toolbox) and Get Started with the Video Labeler (Computer Vision Toolbox).
Detect Object
Train the YOLOv2 object detector from the captured ground truth data and verify the detected object in Connected IO and PIL modes.
Use the tracker.Detector command to check if the value of the LabeledData field is the name of the MAT file that you exported using the Video Labeler app.
tracker.Detector
ans =
struct with fields:
LabeledData: 'objectLabel.mat'
ImageSize: [224 224 3]
NumClasses: 1
SampleImage: 'sampleImage.jpg'
Network: [1x1 struct]
TrainingOptions: [1x1 struct]
DetectorMatFile: 'detectorSaved.mat'Train YOLOv2 Object Detector
Train the YOLOv2 object detector with the images captured from the camera. The objectLabel.mat file contains the exported ground truth data. Use this file to train the YOLOv2 object detector.
From the current directory of the captured object images, select a valid sample image as a reference for training the neural network. For this example, set the sample image to image_50.png.
tracker.Detector.SampleImage = 'image_50.png';
Train the YOLOv2 object detector and save it as the MAT file detectorSaved.mat.
createObjectDetector(tracker)
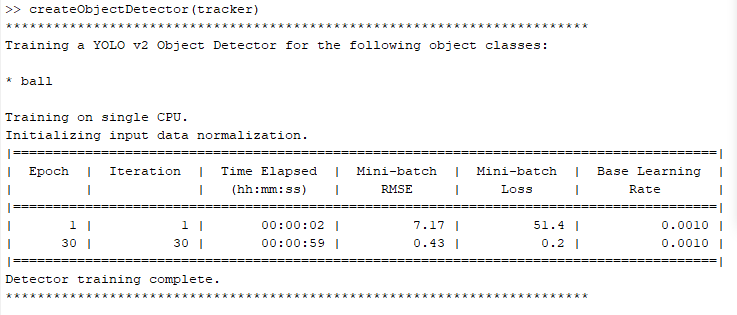
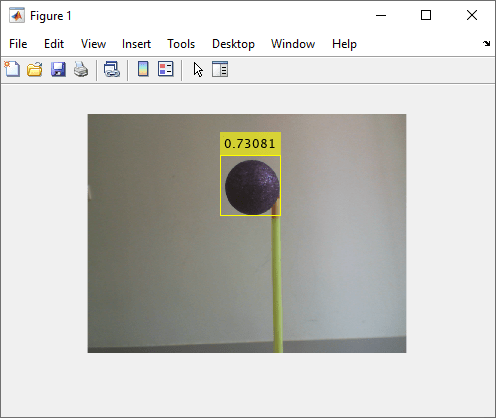
A figure window containing the selected sample image opens once the YOLOv2 neural network has finished training the images. This image shows an ROI and the probability of match within the training network.
Note: You can verify the object detection in either Connected IO or PIL modes.
Verify Object Detection in Connected IO Mode
Use the Connected IO mode to verify the detected object. The image capture process takes place on Raspberry Pi hardware itself.
Run this command at the MATLAB Command Window:
tracker.TestAndProfile
ans =
struct with fields:
PredictFunction: 'raspi_yolov2_detect'
TestMode: 'IO'
TestDuration: 60
Servo: [1x1 struct]The default TestMode value is 'IO'.
Verify object detection in the IO mode:
startTestAndProfile(tracker)
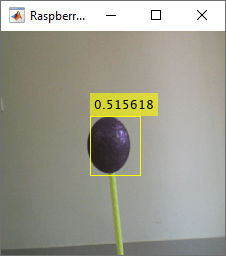
A camera window opens showing an ROI and the probability of match within the training network for the detected object.
Verify Object Detection in PIL Mode
Use the PIL mode to verify the detected object. The image capture process takes place on the Raspberry Pi hardware itself. The raspi_yolov2_detect function runs on the Raspberry Pi board in the PIL mode.
Note: Object detection and tracking in the PIL mode takes some time to execute.
Change the object detection mode to 'PIL'.
tracker.TestAndProfile.TestMode = 'PIL';
Run this command at the MATLAB Command prompt to verify the object detection in PIL mode.
startTestAndProfile(tracker)
A camera window opens showing an ROI and the probability of match within the training network for the detected object.

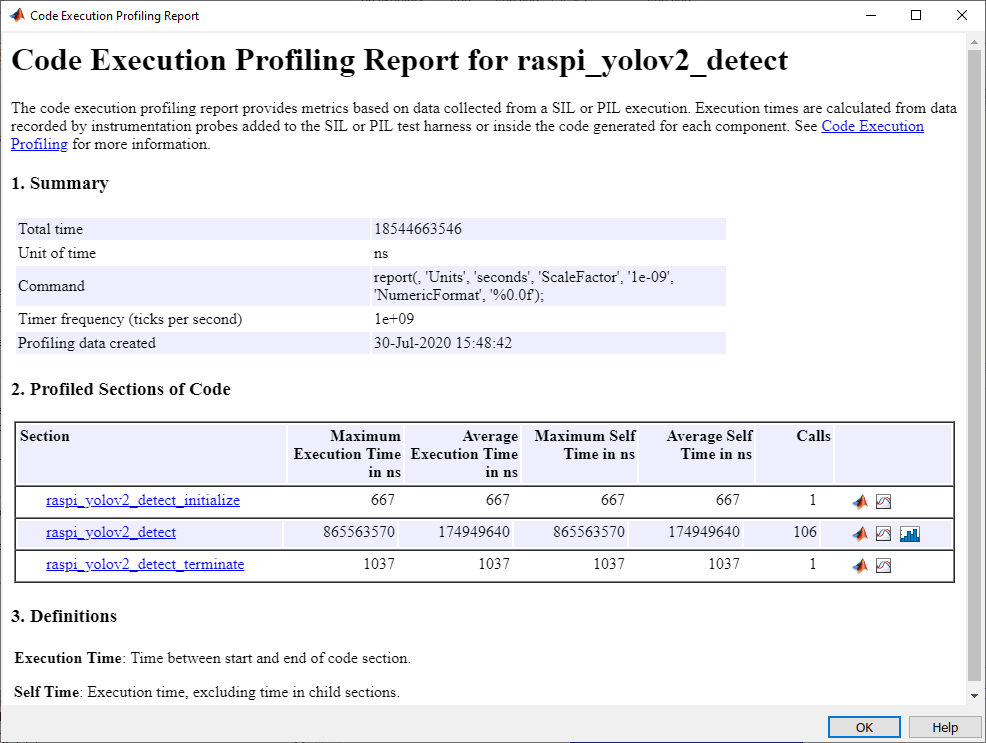
To view the Code Execution Profiling Report, click the Execution profiling report link.
Configure Servo Motor Parameters
To track an object after its successful detection, you must configure the servo motor parameters.
View the servo motor parameters.
tracker.TestAndProfile.Servo
ans =
struct with fields:
TestWithServo: 0
Increment: 0.5000
PinNumber: 12
StartPosition: 90
MinPulseDuration: 5.0000e-04
MaxPulseDuration: 0.0025TestWithServo- Flag to enable or disable the servo motor for tracking the object. The default value of this field isfalse. Enable the servo motor using this command:
tracker.TestAndProfile.Servo.TestWithServo = true;
You can modify these parameters based on the datasheet for your servo motor:
1. Increment - Step angle size of rotation of the servo motor. The default step angle value is 0.5 degrees.
2. PinNumber - GPIO pin number of the Raspberry Pi target board to which the servo motor is connected.
3. StartPosition - Starting angle position of the servo motor. The servo motor rotates from 0 to 180 degrees. The default starting angle is 90 degrees.
4. MinPulseDuration - Minimum pulse duration to move to 0 degrees.
5. MaxPulseDuration - Maximum pulse duration to move to 180 degrees.
Track Object in Connected IO Mode
Use these commands to ensure that object tracking on the servo motor is enabled and the test mode is set to IO:
tracker.TestAndProfile.Servo.TestWithServo = true;
tracker.TestAndProfile.TestMode = 'IO';
Track the detected object in connected IO mode:
startTestAndProfile(tracker)
Place the object in front of the camera and move the object. Observe that the servo motor rotates to follow the moving object.
A camera window opens with the ROI and the probability of match with the training network. A separate window opens to display the angle of the servo motor.
![]()
![]()
Track Object in PIL Mode
Use these commands to ensure that object tracking on the servo motor is enabled and the test mode is set to PIL:
tracker.TestAndProfile.Servo.TestWithServo = true
tracker.TestAndProfile.TestMode = 'PIL';
Track the detected object in connected PIL mode:
startTestAndProfile(tracker)
Place the object in front of the camera and move the object. Observe that the servo motor rotates to follow the moving object.
A camera window opens with the ROI and the probability of match with the training network. A separate window opens to display the angle of the servo motor.
![]()
![]()
Deploy on Raspberry Pi Target Board
The raspi_object_tracking function executes the object tracking algorithm on the Raspberry Pi hardware board. This function follows the tracking algorithm specified in the raspi_yolov2_detect function.
Before deploying the code on the Raspberry Pi target board, open the raspi_object_tracking.m function file and configure the parameters by modifying one or more of these:
Input image size for the ResNet-18 neural network
Observations regarding the servo motor incremental angle, starting position, and so on
Type of camera interface for capturing images of the object
The raspi_yolov2_detect function uses the YOLOv2-based deconvolutional neural network (DNN) saved as a MAT file. Pass inputImg as an input to the detected network. If the object is detected, outImg contains the bounding box information of the detected object. posIncFactor indicates the rotation factor required to maintain the object at the center of the frame for this bounding box.
Open the raspi_yolov2_detect.m file and enter the name of the saved trained neural network MAT file detectorSaved.mat in the yolov2obj parameter.
Run these commands at the MATLAB command prompt. Note: For Raspberry Pi with 32-bit OS use targetHardware('Raspberry Pi') and for 64-bit OS use targetHardware('Raspberry Pi (64bit)').
t = targetHardware('Raspberry Pi (64bit)')
t.CoderConfig.TargetLang = 'C++';
dlcfg = coder.DeepLearningConfig('none');
t.CoderConfig.DeepLearningConfig = dlcfg;
deploy(t,'raspi_object_tracking')
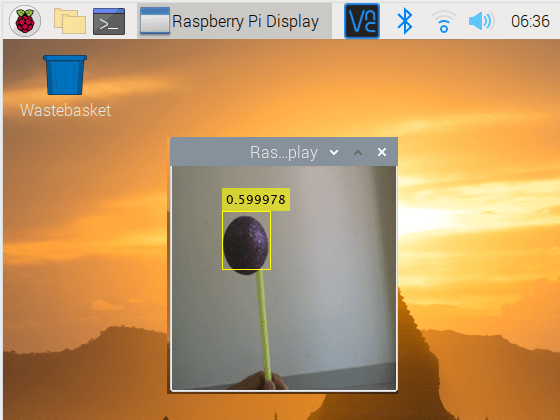
Observe that the camera mounted on the servo motor detects the object and also tracks its movement. On the Raspberry Pi desktop, open the camera display to observe the live tracking results.
The deployed function initiates code generation of the raspi_object_tracking function. Once code generation is complete, MATLAB generates a code generation report. Use this report to debug the raspi_object_tracking function for any build errors or warnings in the generated code.
After successfully generating the code, the blockset loads and runs the object classification algorithm as a standalone executable on the hardware. The executable starts detecting the objects in the acquired video and displays the predicted labels and their associated probabilities. To view the Raspberry Pi screen, use a VNC viewer and open a remote session on the hardware to get the display. You can alternatively connect an HDMI cable from the monitor to the hardware.
Other Things to Try
Train the YOLOv2 object detector to detect and track more than one object.
Use a neural network other than ResNet-18 for training the objects and observe the differences in the obtained results.
Use a different algorithm in the Video Labeler (Computer Vision Toolbox) app and compare the results with the
Point Trackeralgorithm.Change the input image size provided in the
raspi_yolov2_detectfunction and observe the object detection image.
See Also
Identify Objects Within Live Video Using ResNet-50 on Raspberry Pi Hardware
Video Labeler (Computer Vision Toolbox) app
Get Started with the Video Labeler (Computer Vision Toolbox)