bfsearch
Breadth-first graph search
Syntax
Description
v = bfsearch(G,s)G starting at node s. The result is a vector of
node IDs in order of their discovery.
[___] = bfsearch(___,'Restart',,
where tf)tf is true, restarts the search if no new
nodes are reachable from the discovered nodes. You can use any of the input or output
argument combinations in previous syntaxes. This option ensures that the breadth-first
search reaches all nodes and edges in the graph, even if they are not reachable from the
starting node, s.
Examples
Create and plot a graph.
s = [1 1 1 1 2 2 2 2 2]; t = [3 5 4 2 6 10 7 9 8]; G = graph(s,t); plot(G)
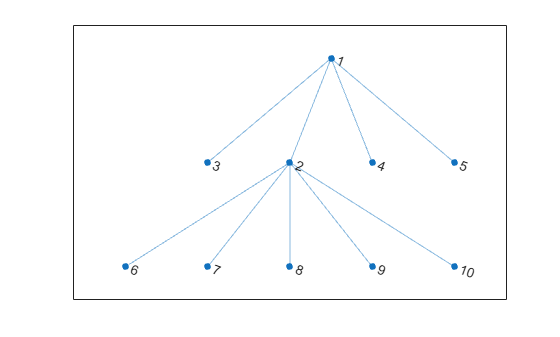
Perform a breadth-first search of the graph starting at node 2. The result indicates the order of node discovery.
v = bfsearch(G,2)
v = 10×1
2
1
6
7
8
9
10
3
4
5
Create and plot a directed graph.
s = [1 1 1 2 3 3 3 4 6]; t = [2 4 5 5 6 7 4 1 4]; G = digraph(s,t); plot(G)
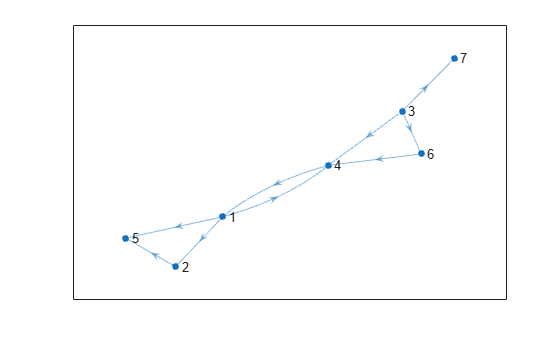
Perform a breadth-first search on the graph starting at node 1. Specify 'allevents' to return a table containing all of the events in the algorithm.
T = bfsearch(G,1,'allevents')T=14×4 table
Event Node Edge EdgeIndex
________________ ____ __________ _________
startnode 1 NaN NaN NaN
discovernode 1 NaN NaN NaN
edgetonew NaN 1 2 1
discovernode 2 NaN NaN NaN
edgetonew NaN 1 4 2
discovernode 4 NaN NaN NaN
edgetonew NaN 1 5 3
discovernode 5 NaN NaN NaN
finishnode 1 NaN NaN NaN
edgetodiscovered NaN 2 5 4
finishnode 2 NaN NaN NaN
edgetofinished NaN 4 1 8
finishnode 4 NaN NaN NaN
finishnode 5 NaN NaN NaN
To follow the steps in the algorithm, read the events in the table from top to bottom. For example:
The algorithm begins at node 1
An edge is discovered between node 1 and node 2
Node 2 is discovered
and so on...
Perform a breadth-first search of a graph with multiple components, and then highlight the graph nodes and edges based on the search results.
Create and plot a directed graph. This graph has two weakly connected components.
s = [1 1 2 2 2 3 4 7 8 8 8 8]; t = [3 4 7 5 6 2 6 2 9 10 11 12]; G = digraph(s,t); p = plot(G,'Layout','layered');
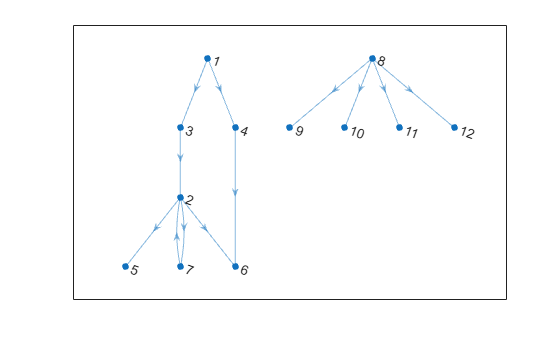
c = conncomp(G,'Type','weak')
c = 1×12
1 1 1 1 1 1 1 2 2 2 2 2
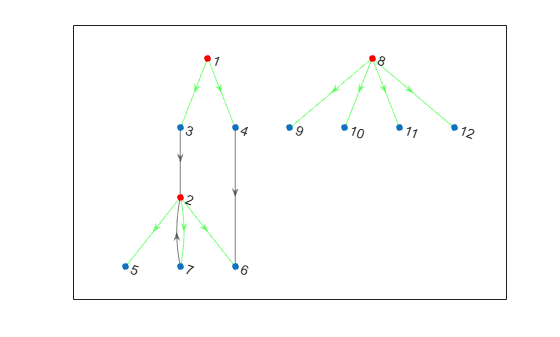
Perform a breadth-first search of the graph starting at node 2, and flag the 'edgetonew', 'edgetofinished', and 'startnode' events. Specify Restart as true to make the search restart whenever there are remaining nodes that cannot be reached.
events = {'edgetonew','edgetofinished','startnode'};
T = bfsearch(G,2,events,'Restart',true)T=15×4 table
Event Node Edge EdgeIndex
______________ ____ __________ _________
startnode 2 NaN NaN NaN
edgetonew NaN 2 5 3
edgetonew NaN 2 6 4
edgetonew NaN 2 7 5
edgetofinished NaN 7 2 8
startnode 1 NaN NaN NaN
edgetonew NaN 1 3 1
edgetonew NaN 1 4 2
edgetofinished NaN 3 2 6
edgetofinished NaN 4 6 7
startnode 8 NaN NaN NaN
edgetonew NaN 8 9 9
edgetonew NaN 8 10 10
edgetonew NaN 8 11 11
edgetonew NaN 8 12 12
When Restart is true, the 'startnode' event returns information about where and when the algorithm restarts the search.
Highlight the graph based on event:
Color the starting nodes red.
Green edges are for
'edgetonew'Black edges are for
'edgetofinished'
highlight(p, 'Edges', T.EdgeIndex(T.Event == 'edgetonew'), 'EdgeColor', 'g') highlight(p, 'Edges', T.EdgeIndex(T.Event == 'edgetofinished'), 'EdgeColor', 'k') highlight(p,T.Node(~isnan(T.Node)),'NodeColor','r')
Use breadth-first search to determine that a graph is bipartite, and return the relevant partitions. A bipartite graph is a graph that has nodes you can divide into two sets, A and B, with each edge in the graph connecting a node in A to a node in B.
Create and plot a directed graph.
s = [1 1 1 1 2 2 4 5 6 7 8]; t = [2 3 6 8 5 10 6 6 10 3 10]; g = digraph(s,t); plot(g);
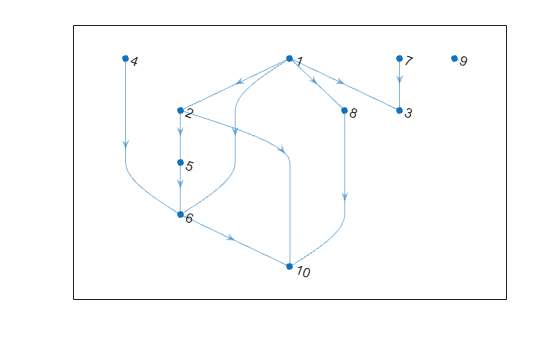
Use a breadth-first search on the graph to determine if it is bipartite, and if so, return the relevant partitions.
events = {'edgetonew', 'edgetodiscovered', 'edgetofinished'};
T = bfsearch(g, 1, events, 'Restart', true);
partitions = false(1, numnodes(g));
is_bipart = true;
is_edgetonew = T.Event == 'edgetonew';
ed = T.Edge;
for ii=1:size(T, 1)
if is_edgetonew(ii)
partitions(ed(ii, 2)) = ~partitions(ed(ii, 1));
else
if partitions(ed(ii, 1)) == partitions(ed(ii, 2))
is_bipart = false;
break;
end
end
end
is_bipart
is_bipart = logical
1
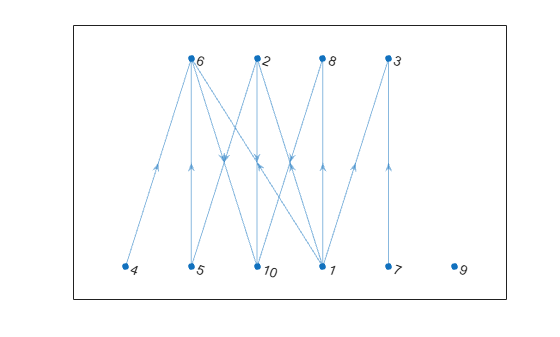
Since g is bipartite, the partitions variable contains the information about which partition each node belongs to.
Plot the bipartite graph with the 'layered' layout, using the partitions variable to specify the source nodes that appear in the first layer.
partitions
partitions = 1×10 logical array
0 1 1 0 0 1 0 1 0 0
plot(g, 'Layout', 'layered', 'Source', find(partitions));
Input Arguments
Output Arguments
Tips
dfsearchandbfsearchtreat undirected graphs the same as directed graphs. An undirected edge between nodessandtis treated like two directed edges, one fromstotand one fromttos.
Algorithms
The Breadth-First search algorithm begins at the starting node, s, and
inspects all of its neighboring nodes in order of their node index. Then for each of those
neighbors, it visits their unvisited neighbors in order. The algorithm continues until all
nodes that are reachable from the starting node have been visited.
In pseudo-code, the algorithm can be written as:
Event startnode(S)
Event discovernode(S)
NodeList = {S}
WHILE NodeList is not empty
C = NodeList{1}
Remove first element from NodeList
FOR edge E from outgoing edges of node C, connecting to node N
Event edgetonew(C,E), edgetodiscovered(C,E) or edgetofinished(C,E)
(depending on the state of node N)
IF event was edgetonew
Event discovernode(N)
Append N to the end of NodeList
END
END
Event finishnode(C)
END
bfsearch can return flags to describe the different events in the
algorithm, such as when a new node is discovered or when all of the outgoing edges of a node
have been visited. The event flags are listed here.
| Event Flag | Event Description |
|---|---|
'discovernode' |
A new node has been discovered. |
'finishnode' |
All outgoing edges from the node have been visited. |
'startnode' |
This flag indicates the starting node in the search. |
'edgetonew' |
Edge connects to an undiscovered node |
'edgetodiscovered' |
Edge connects to a previously discovered node |
'edgetofinished' |
Edge connects to a finished node |
For more information, see the input argument description for
events.
Note
In cases where the input graph contains nodes that are unreachable from the starting
node, the 'Restart' option provides a way to make the search visit every
node in the graph. In that case, the 'startnode' event indicates the
starting node each time the search restarts.
Extended Capabilities
Version History
Introduced in R2015b