convhulln
N-D convex hull
Description
Examples
Create a matrix of 3-D points and compute the convex hull and its volume.
P = rand(10,3); [k,vol] = convhulln(P);
Plot the convex hull.
trisurf(k,P(:,1),P(:,2),P(:,3),FaceColor="cyan")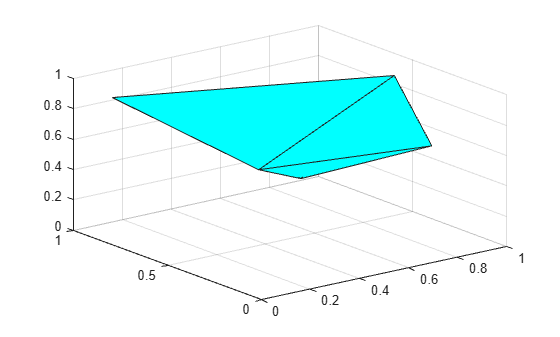
Display the volume of the convex hull.
vol
vol = 0.1857
Input Arguments
Output Arguments
Tips
Use the
plotfunction to plot the output ofconvhullnin two dimensions. Usetrisurfortrimeshto plot the output ofconvhullnin three dimensions.For better algorithm efficiency with 2-D and 3-D input, consider using the
convhullfunction or creating atriangulationordelaunayTriangulationobject and using theconvexHullobject function.
Algorithms
convhulln is based on Qhull [1]. For information, see http://www.qhull.org/. For copyright information, see http://www.qhull.org/COPYING.txt.
References
[1] Barber, C.B., D.P. Dobkin, and H.T. Huhdanpaa. “The Quickhull Algorithm for Convex Hulls.” ACM Transactions on Mathematical Software, Vol. 22, No. 4, Dec. 1996, p 469–483.
Extended Capabilities
Version History
Introduced before R2006a
See Also
convexHull | convhull | triangulation | delaunayTriangulation