SinCos
Compute SinCos operation using CORDIC approximation method and
simulate with latency
Libraries:
HDL Coder
Description
The SinCos block computes the sine and cosine of input signal by using the coordinate rotation digital computer (CORDIC) approximation method. For more information, see CORDIC approximation method in Algorithms. The block has control signals that indicate whether the input and output data are valid. You can also specify the number of iterations of the algorithm and the latency strategy.
To use this block in your Simulink® model, open the HDLMathLib library by entering this command
in the MATLAB® Command
Window:
open_system('HDLMathLib')Examples
Implement Sine and Cosine Block with Control Signals
Implement the control-signal based SinCos block and use it generate HDL code.
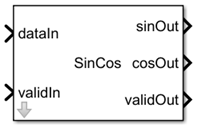
Ports
Input
Input data signal to compute sine and cosine function, specified as a scalar or vector. The input value ranges from -2π to 2*π.
Data Types: int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | Boolean | fixed point | bus
Input control signal that indicates whether the input signal is valid, specified as a scalar.
Data Types: Boolean
Output
Output data signal that is the sine of the input signal, returned as a scalar or vector.
Data Types: int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | Boolean | fixed point | bus
Output data signal that is the cosine of the input signal, returned as a scalar or vector.
Data Types: int8 | int16 | int32 | int64 | uint8 | uint16 | uint32 | uint64 | Boolean | fixed point | bus
Output control signal that indicates whether output signal is valid, returned as a scalar.
Data Types: Boolean
Parameters
Specify the number of iterations for CORDIC algorithm.
Programmatic Use
Block Parameter:
iter |
| Type: character vector |
Values: Integer
values |
Default: '11' |
Specify whether to use minimum, maximum, custom, or zero latency. For more information, see Latency Strategy.
To use custom latency for the block, set the Latency strategy to
Custom and enter the latency value in the Custom
latency field.
You can also control the number of pipeline stages
for the iterative algorithm. To customize the latency for iterative algorithm, set the
Latency strategy to Custom(PerIteration) and
enter the iterations per pipeline value in the IterationsPerPipeline
field. (since R2025a)
Programmatic Use
Block Parameter:
latencyMode |
| Type: character vector |
Values: 'Max' |
'Min' | 'Custom' |
'Custom(PerIteration)' | 'Zero' |
Default: 'Max' |
Specify the custom latency value. The latency must be a nonnegative integer in the range [0, L], where L is the maximum latency value of SinCos block. For more information, see CustomLatency.
Dependency
To enable this parameter, set Latency strategy to
Custom.
Programmatic Use
Block Parameter:
customLatencyValue |
| Type: Integer |
Values: 0 to Max
latency |
Default: 0 |
Since R2025a
Specify the iterations to use per each pipeline stage in the algorithm.
Dependency
To enable this parameter, set Latency strategy to
Custom(PerIteration).
Programmatic Use
Block Parameter:
iterationsPerPipelineValue |
| Type: Integer |
| Values: Positive integer |
Default: 1 |
Algorithms
CORDIC is an acronym for coordinate rotation digital computer. The Givens rotation-based CORDIC algorithm is one of the most hardware-efficient algorithms available because it requires only iterative shift-add operations (see References). The CORDIC algorithm eliminates the need for explicit multipliers. Using CORDIC, you can calculate various functions such as sine, cosine, arc sine, arc cosine, arc tangent, and vector magnitude. You can also use this algorithm for divide, square root, hyperbolic, and logarithmic functions.
Increasing the number of CORDIC iterations can produce more accurate results, but doing so increases the expense of the computation and adds latency.
You can simulate the SinCos block with latency. This block is a masked
subsystem that contains a MATLAB Function block,
LumpLatency. The subsystem uses this MATLAB Function block to compute
the latency based on the Number of iterations. To view the function
that computes the latency of the block, open the LumpLatency block in the
masked subsystem. To view inside the mask, click the ⇩ icon on the block.
This table shows how the block calculates the latency based on the setting of the Latency strategy parameter:
| Latency Strategy | Latency Value (L) |
|---|---|
Max | Uses maximum latency by using the equation L = N + 1, where N is the value of the Number of iterations parameter. |
Min | Uses minimum latency by using the equation L = 2 +
|
Custom | Specifies a custom latency value. To specify the latency, enter a value between zero and the maximum latency in the Custom latency parameter. For more information, see Custom latency. |
Custom(PerIteration) | Use this setting to control the pipeline stages for the iterative algorithm. Specify the number of pipeline stages per iteration using
the IterationsPerPipeline parameter. The block uses the
equation L = 1 + |
Zero | The latency of the block is 0. |
The SinCos block uses pipelined architectures to implement the
CORDIC-based sine and cosine algorithm. By default, the block uses the maximum latency,
which depends on the Number of iterations parameter. The block performs
a single iteration per pipeline stage. For example, if you set the Number of
iterations to 15, the latency of the block is
16, based on the latency equation in Latency Considerations. When you increase
number of iterations, the latency of the block also increases.
You can customize the latency for the iterative algorithm by setting Latency
strategy to Custom(PerIteration), which allows you
to control the number of iterations per pipeline stages. For example, if you set the
Number of iterations to 15 and you want the block
to perform the iterations in three pipeline stages, then set the
IterationsPerPipeline to 15/3 = 5. By using the
Custom(PerIteration) latency strategy, the latency of the block
reduces to 4.
References
[1] Volder, Jack E., “The CORDIC Trigonometric Computing Technique.” IRE Transactions on Electronic Computers EC-8 (1959); 330–334.
[2] Andraka, Ray “A Survey of CORDIC Algorithm for FPGA Based Computers.” Proceedings of the 1998 ACM/SIGDA Sixth International Symposium on Field Programmable Gate Arrays. Feb. 22–24 (1998): 191–200.
[3] Walther, J.S., “A Unified Algorithm for Elementary Functions,” Proceedings of the Spring Joint Computer Conference, May 18-20, 1971: 379–386.
[4] Schelin, Charles W., “Calculator Function Approximation,” The American Mathematical Monthly 90, no. 5 (1983): 317–325.
Extended Capabilities
The block supports HDL code generation using HDL Coder™. HDL Coder provides additional configuration options that affect HDL implementation and synthesized logic.
| Architecture | Description |
|---|---|
Module (default) | Generate code for the subsystem and the blocks within the subsystem. |
BlackBox | Generate a black box interface. The generated HDL code includes only the input/output port definitions for the subsystem. Therefore, you can use a subsystem in your model to generate an interface to existing, manually written HDL code. The black-box interface generation for subsystems is similar to the Model block interface generation without the clock signals. |
| Remove the subsystem from the generated code. You can use the subsystem in simulation, however, treat it as a “no-op” in the HDL code. |
| General | |
|---|---|
| AdaptivePipelining | Automatic pipeline insertion based on the synthesis tool, target frequency, and
multiplier word-lengths. The default is |
| BalanceDelays | Detects introduction of new delays along one path and inserts
matching delays on the other paths. The default is |
| ClockRatePipelining | Insert pipeline registers at a faster clock rate instead of the slower data rate. The
default is |
| ConstrainedOutputPipeline | Number of registers to place at
the outputs by moving existing delays within your design. Distributed
pipelining does not redistribute these registers. The default is
|
| DistributedPipelining | Pipeline register distribution,
or register retiming. The default is |
| FlattenHierarchy | Remove subsystem hierarchy from generated HDL code. The default
is |
| InputPipeline | Number of input pipeline stages
to insert in the generated code. Distributed pipelining and constrained
output pipelining can move these registers. The default is
|
| OutputPipeline | Number of output pipeline stages
to insert in the generated code. Distributed pipelining and constrained
output pipelining can move these registers. The default is
|
| SharingFactor | Number of functionally equivalent resources to map to a single shared resource. The default is 0. See also Resource Sharing. |
| StreamingFactor | Number of parallel data paths, or vectors, that are time multiplexed to transform into serial, scalar data paths. The default is 0, which implements fully parallel data paths. See also Streaming. |
| SynthesisAttributes |
Specifies the synthesis attributes for the blocks and block output signals in the model. The generated HDL code contains these attributes. For more information, see SynthesisAttributes. |
Target Specification
This block cannot be the DUT, so the block property settings in the Target Specification tab are ignored.
You cannot use this block in a Synchronous Subsystem block.
The block does not support resource sharing optimization.
Version History
Introduced in R2020bThe DSPStyle HDL block property has been removed. To specify synthesis attributes for multiplier mapping, use the SynthesisAttributes HDL block property instead.
Use the SynthesisAttributes HDL block property to specify the synthesis attributes for the block and its output signals. HDL Coder includes these attributes in the generated HDL code.
You can control the pipeline stages for iterative algorithms by setting the
LatencyStrategy parameter HDL to
Custom(PerIterations), then specifying the number of pipeline
stages per iteration by using the IterationsPerPipeline parameter. Use
this setting to control the pipeline stages in the generated code and optimize the design
for speed and resource utilization.
See Also
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: .
You can also select a web site from the following list
How to Get Best Site Performance
Select the China site (in Chinese or English) for best site performance. Other MathWorks country sites are not optimized for visits from your location.
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)