trackCLEARMetrics
Description
The trackCLEARMetrics object implements the Classification of Events,
Activities, and Relationships (CLEAR) Multi-Object Tracking (MOT) metrics, which evaluate
tracking performance by comparing tracks with ground truth. Other than CLEAR, the object also
outputs Mostly-Tracked, Partially-Tracked, and Mostly-Lost MOT metrics. You can set the
similarity method to intersection over union, Euclidean distance, and a custom method. The
object uses the similarity method to compare tracks with truth.
Creation
Properties
Object Functions
evaluate | Evaluate metrics on tracks and truths |
Examples
Create a trackCLEARMetrics object and set the SimilarityThreshold property to "0.8".
metric = trackCLEARMetrics(SimilarityThreshold=0.8);
Load a tracking dataset consisting of truths and tracks.
load("trackCLEARData.mat","tracks","truths");
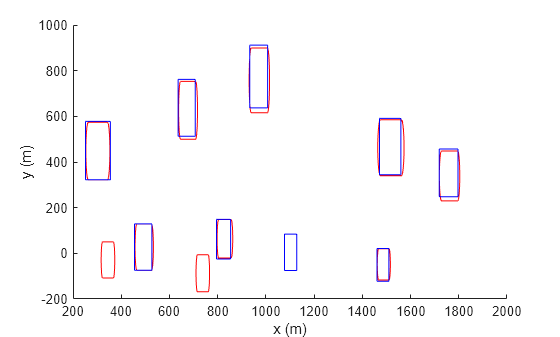
Visualize tracks in red and truths in blue.
figure for t = 0:0.5:10 % Extract tracks at a certain time stamp. tracks_t = tracks([tracks.Time] == t); % Extract turths at a certain time stamp. truths_t = truths([truths.Time] == t); cla; % Clean plotting in axes if any. for j=1:numel(tracks_t) posTrack = tracks_t(j).BoundingBox; posTrack(2) = posTrack(2)-posTrack(4); rectangle(Position=posTrack,EdgeColor="r",Curvature=[0.2 1]); end for j=1:numel(truths_t) posTruth = truths_t(j).BoundingBox; posTruth(2) = posTruth(2)-posTruth(4); rectangle(Position=posTruth,EdgeColor="b"); end xlabel("x (m)") ylabel("y (m)") pause(0.2) % Pause the animation 0.2 seconds for each time stamp. end
Evaluate the CLEAR MOT metrics.
metricTable = evaluate(metric,tracks,truths)
metricTable=1×12 table
MOTA (%) MOTP (%) Mostly Tracked (%) Partially Tracked (%) Mostly Lost (%) False Positive False Negative Recall (%) Precision (%) False Track Rate ID Switches Fragmentations
________ ________ __________________ _____________________ _______________ ______________ ______________ __________ _____________ ________________ ___________ ______________
27.737 85.492 50 40 10 56 43 68.613 62.667 3.7333 0 16
Create a trackCLEARMetrics object. Set the SimilarityMethod property to "Euclidean" and set the EuclideanScale property to 2.
metric = trackCLEARMetrics(SimilarityMethod="Euclidean",EuclideanScale=2);Load a tracking dataset consisting of tracks and truths.
load("trackCLEAREuclideanData.mat","tracks","truths");
Visualize tracks in red circles and truths in blue diamonds.
figure for t = 0:0.5:10 % Extract tracks at a certain time stamp. tracks_t = tracks([tracks.Time] == t); % Extract truths at a certain time stamp. truths_t = truths([truths.Time] == t); hold off; for j=1:numel(tracks_t) position = tracks_t(j).Position; plot(position(1),position(2),"ro") hold on; end for j=1:numel(truths_t) position = truths_t(j).Position; plot(position(1),position(2),"bd") end xlabel("x (m)") ylabel("y (m)") pause(0.2) % Pause the animation 0.2 seconds for each time stamp. end

Evaluate the CLEAR MOT metrics.
metricTable = evaluate(metric,tracks,truths)
metricTable=1×12 table
MOTA (%) MOTP (%) Mostly Tracked (%) Partially Tracked (%) Mostly Lost (%) False Positive False Negative Recall (%) Precision (%) False Track Rate ID Switches Fragmentations
________ ________ __________________ _____________________ _______________ ______________ ______________ __________ _____________ ________________ ___________ ______________
57.5 80.934 50 50 0 3 14 65 89.655 0.14286 0 1
Create a trackCLEARMetrics object. Set the SimilarityMethod property to "Custom" and set the CustomSimilarityFcn property to @mySimilarityFcn.
metric = trackCLEARMetrics(SimilarityMethod="Custom",CustomSimilarityFcn=@mySimilarityFcn);Load a tracking dataset consisting of tracks and truths.
load("trackCLEAREuclideanData.mat","tracks","truths");
Visualize tracks in red circles and truths in blue diamonds.
figure for t = 0:0.5:10 % Extract tracks at a certain time stamp. tracks_t = tracks([tracks.Time] == t); % Extract turths at a certain time stamp. truths_t = truths([truths.Time] == t); hold off; for j=1:numel(tracks_t) position = tracks_t(j).Position; plot(position(1),position(2),"ro") hold on; end for j=1:numel(truths_t) position = truths_t(j).Position; plot(position(1),position(2),"bd") end xlabel("x (m)") ylabel("y (m)") pause(0.2) % Pause the animation 0.2 seconds for each time stamp. end

Evaluate the CLEAR MOT metrics.
metricTable = evaluate(metric,tracks,truths)
metricTable=1×12 table
MOTA (%) MOTP (%) Mostly Tracked (%) Partially Tracked (%) Mostly Lost (%) False Positive False Negative Recall (%) Precision (%) False Track Rate ID Switches Fragmentations
________ ________ __________________ _____________________ _______________ ______________ ______________ __________ _____________ ________________ ___________ ______________
72.5 95.397 50 50 0 0 11 72.5 100 0 0 1
Custom Similarity Function
function sims = mySimilarityFcn(tracks,truths) numTracks = numel(tracks); numTruths = numel(truths); sims = NaN(numTracks,numTruths); for i = 1:numTracks for j = 1:numTruths pTrack = tracks(i).Position; pTruth = truths(i).Position; sims(i,j) = max(0,1-norm(pTrack-pTruth)/norm(pTruth)); end end end
Algorithms
The trackCLEARMetrics object implements the CLEAR
algorithms and takes these steps to calculate various metrics based on a list of tracks
(T) and truths (R).
First, the object loops over each time step tk, k = 1, …, N, derived from the time in the list of truths.
The object extracts all the tracks and truths at time tk as Tk and Rk, respectively, from the track list (T) and truth list (R).
The object calculates the similarity scores between tracks in Tk and truths in Rk based on the specified similarity method.
Using the calculated similarities at tk and the matching history at tk-1, the object forms a cost matrix for matching between Tk and Rk. After that, the object matches between Tk and Rk based on the Hungarian assignment algorithm and the similarity threshold.
There are three types of results from the matching:
True match — A match that associates a valid track in Tk to a valid truth in Rk.
False positive — A match in which a track is not associated to any truths.
False negative — A match in which a truth is not associated to any tracks.
The object increments the number of true matches, false positives, and false negatives, as well as the sum of all true matches similarity scores across timestamps.
Using the true matches of the previous timestamp, the object also increments the number of track switches and track fragmentations. A track switch occurs if a true object is matched in both the current and previous timestamps and the identity of the matched track changes across these two timestamps. A track fragmentation occurs if a true object has a true match in the current timestamp but does not have a true match in the previous timestamp.
Next, the object calculates metrics based on various values cumulated during the loop. In particular, it calculates the multiple object tracking accuracy (MOTA) , the multiple object tracking precision (MOTP), the Precision, and the Recall metrics as follows:
MOTA metric:
where ntruths is the total number of truth occurrences across all time steps, nfp is the total number of false positives, nfn is the total number of false negatives, and ns is the total number of switches.
MOTP:
where nt is the total number of true matches across all time stamps and si is the similarity score of the i-th true match.
Precision:
where nt is the total number of true matches and nfp is the total number of false positives.
Recall:
where nt is the total number of true matches and nfn is the total number of false negatives.
The definitions for all the metrics are given in the results argument
of the evaluate object function.
References
[1] Bernardin, Keni, and Rainer Stiefelhagen. “Evaluating Multiple Object Tracking Performance: The CLEAR MOT Metrics.” EURASIP Journal on Image and Video Processing, vol. 2008, 2008, pp. 1–10.
[2] Luiten, Jonathon, et al. “HOTA: A Higher Order Metric for Evaluating Multi-Object Tracking.” International Journal of Computer Vision, vol. 129, no. 2, Feb. 2021, pp. 548–78.
[3] Li, Yuan, et al. “Learning to Associate: HybridBoosted Multi-Target Tracker for Crowded Scene.” 2009 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2009, pp. 2953–60.
Version History
Introduced in R2023a