Downsampler
Libraries:
DSP HDL Toolbox /
Signal Operations
Description
The Downsampler block downsamples an input signal by removing K–1 data samples between input samples. The block supports these combinations of input and output data.
Scalar input and scalar output
Vector input and scalar output
Vector input and vector output
The block provides an architecture suitable for HDL code generation and hardware deployment.
Note
You can also generate HDL code for this hardware-optimized algorithm, without creating a Simulink® model, by using the DSP HDL IP Designer app. The app provides the same interface and configuration options as the Simulink block.
Examples

Implement Downsampler For HDL
Downsample data by using the Downsampler block.
Ports
Input
Output
Parameters
Algorithms
The latency of the block changes according to the length of the input and the sample
offset. V is the length of the input and O is the
sample offset. The latency of block is 1 when you set the Downsample factor
(K) parameter to 1. This table shows the latency of the
block.
| Input Data | Output Data | Latency in Clock Cycles |
|---|---|---|
| Scalar | Scalar | 2 + O |
| Vector | Scalar | 1 + floor(O/V) |
| Vector | Vector | 2 |
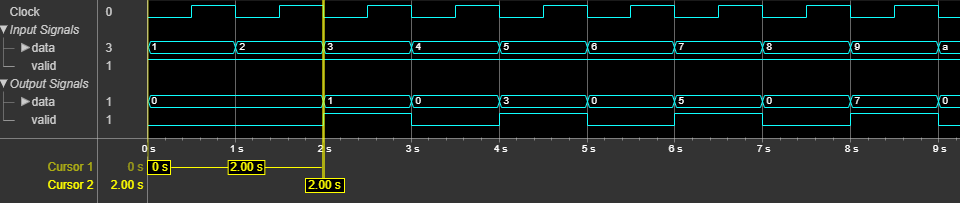
This figure shows the output of the block with the default configuration, when you set
the Downsample factor (K) and Sample offset (0 to
K-1) parameters to 2 and 0,
respectively. The latency of the block is two clock cycles and is calculated as 2 +
O, where O is the sample offset.
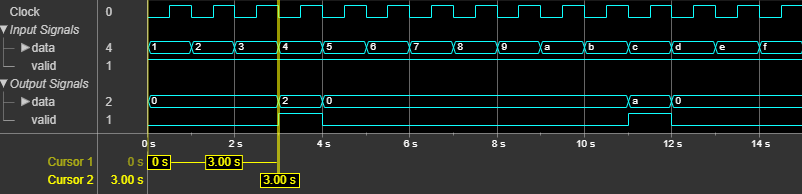
This figure shows the output of the block when you set the Downsample factor
(K) parameter value to 8 and the Sample offset
(0 to K-1) parameter value to 1. The latency of the block
is three clock cycles.
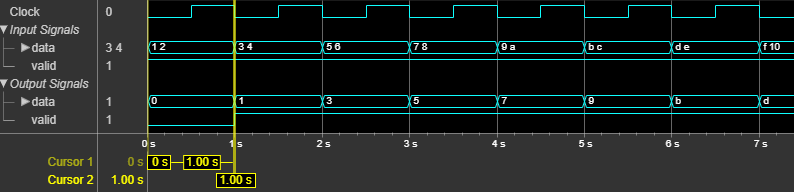
This figure shows the output of the block for a two-element column vector input when
you set the Downsample factor (K) and Sample offset (0 to
K-1) parameters to 2 and 0,
respectively. The latency of the block is one clock cycle.
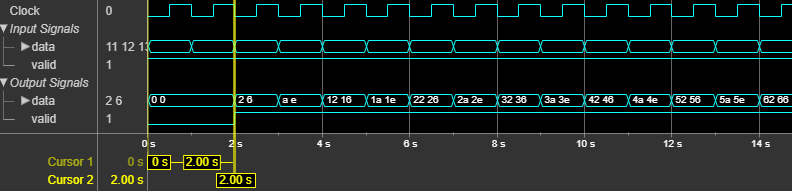
This figure shows the output of the block for an eight-element column vector input
when you set the Downsample factor (K) parameter value to
4 and the Sample offset (0 to K-1) parameter
value to 1. The latency of the block is two clock cycles.
Extended Capabilities
Version History
Introduced in R2022b