Overview of Lane Changing System
An automated lane-changing system enables autonomous vehicles to change lanes and travel along a collision-free path to reach a destination. Automated Driving Toolbox™ provides application examples that show you how to design a lane-changing system and automate testing for highway driving scenarios. The toolbox also includes examples that show you how to design the sensor fusion, planner, and controller components of a lane-changing system. This topic presents an overview of various application examples, and helps you get started with building a lane-changing system.
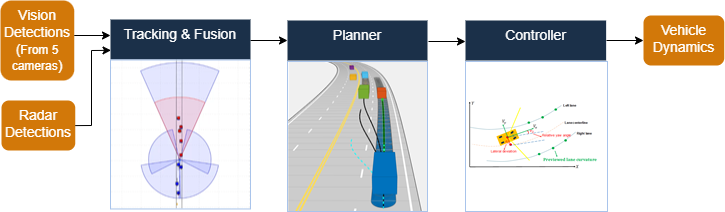
To capture its surrounding view, you must equip the ego vehicle with multiple cameras and a radar sensor. A lane-changing system receives vision and radar detections and outputs steering and acceleration commands to a vehicle dynamics system, which models the motion of the ego vehicle. The system consists of these components:
Sensor Fusion and Tracking — Fuses vehicle detections from the camera and radar sensors, and tracks the positions of detected vehicles across multiple frames.
Planner — Finds the most important objects surrounding the ego vehicle, predicts their motion, and generates the optimal trajectory.
Control — Computes the required acceleration and steering angle to enable the ego vehicle to travel along the generated trajectory.
This table lists applicable examples for each lane-changing goal.
| Goal | Example | Sensor Input | Simulation Environment |
|---|---|---|---|
Design lane-changing system for highway driving scenarios. | Highway Lane Change |
| Cuboid |
Automate testing of lane-changing system against multiple driving scenarios. | Automate Testing for Highway Lane Change |
| Cuboid |
Design sensor fusion component to track detections from multiple cameras and a radar. | Surround Vehicle Sensor Fusion |
| Cuboid |
Design planner and controller components of lane-changing system. | Highway Lane Change Planner and Controller |
| Cuboid |
Generate code for a lane-change planner, and validate the functional equivalence with simulation. | Generate Code for Highway Lane Change Planner |
| Cuboid |
Simulate highway lane-change planner with RoadRunner Scenario. | Highway Lane Change Planner with RoadRunner Scenario |
| RoadRunner Scenario |