rlocus
Root locus of dynamic system
Description
[
calculates the root locus of SISO model r,kout] = rlocus(sys)sys and returns the resulting
vector of feedback gains k and corresponding complex root locations
r.
To produce a smooth root locus, rlocus automatically selects a
set of positive feedback gains.
For more information about the root locus of a dynamic system, see Algorithms.
rlocus(___) plots the root locus of the SISO model
sys with default plotting options for all of the previous input
argument combinations. For more plot customization options, use rlocusplot.
To plot the root locus for multiple dynamic systems on the same plot, you can specify
sysas a comma-separated list of models. For example,rlocus(sys1,sys2,sys3)plots the root locus for three models on the same plot.To specify a color, line style, and marker for each system in the plot, specify a
LineSpecvalue for each system. For example,rlocus(sys1,LineSpec1,sys2,LineSpec2)plots two models and specifies their plot style. For more information on specifying aLineSpecvalue, seerlocusplot.
Examples
For this example, plot the root-locus of the following SISO dynamic system:
sys = tf([2 5 1],[1 2 3]); rlocus(sys)
The poles of the system are denoted by x, while the zeros are denoted by o on the root locus plot. You can use the menu within the generated root locus plot to add grid lines, zoom in or out, and also invoke the Property Editor to customize the plot.
For more plot customization options, use rlocusplot.
For this example, consider sisoModels.mat which contains the following three SISO models:
sys1a transfer function modelsys2a state-space modelsys3a zero-pole-gain model
Load the models from the mat file.
load('sisoModels.mat','sys1','sys2','sys3');
Create the root locus plot using rlocus and specify the color for each system. Also add a legend to the root locus plot.
rlocus(sys1,'b',sys2,'k',sys3,'r') hold on legend('sys1','sys2','sys3') hold off
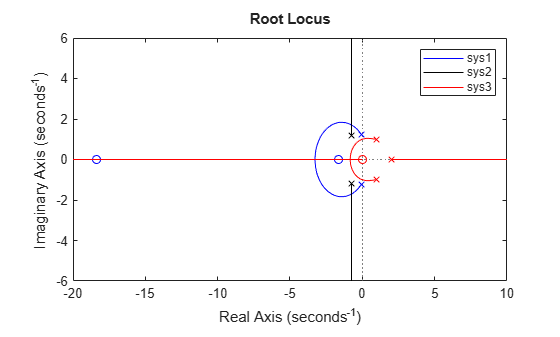
The figure contains root locus diagrams for all three systems in the same plot. For more plot customization, see rlocusplot.
For this example, consider the following SISO transfer function model:
Use the above transfer function model with rlocus to extract the closed-loop poles and associated feedback gain values.
sys = tf([3 0 1],[9 7 5 6]); [r,k] = rlocus(sys)
r = 3×53 complex
102 ×
-0.0094 + 0.0000i -0.0104 + 0.0000i -0.0105 + 0.0000i -0.0106 + 0.0000i -0.0107 + 0.0000i -0.0108 + 0.0000i -0.0109 + 0.0000i -0.0111 + 0.0000i -0.0112 + 0.0000i -0.0113 + 0.0000i -0.0115 + 0.0000i -0.0117 + 0.0000i -0.0119 + 0.0000i -0.0121 + 0.0000i -0.0124 + 0.0000i -0.0126 + 0.0000i -0.0129 + 0.0000i -0.0132 + 0.0000i -0.0135 + 0.0000i -0.0139 + 0.0000i -0.0143 + 0.0000i -0.0148 + 0.0000i -0.0152 + 0.0000i -0.0158 + 0.0000i -0.0163 + 0.0000i -0.0170 + 0.0000i -0.0177 + 0.0000i -0.0184 + 0.0000i -0.0192 + 0.0000i -0.0201 + 0.0000i -0.0211 + 0.0000i -0.0222 + 0.0000i -0.0233 + 0.0000i -0.0246 + 0.0000i -0.0259 + 0.0000i -0.0274 + 0.0000i -0.0290 + 0.0000i -0.0307 + 0.0000i -0.0326 + 0.0000i -0.0346 + 0.0000i -0.0368 + 0.0000i -0.0392 + 0.0000i -0.0418 + 0.0000i -0.0446 + 0.0000i -0.0476 + 0.0000i -0.0508 + 0.0000i -0.0543 + 0.0000i -0.0582 + 0.0000i -0.0623 + 0.0000i -0.0667 + 0.0000i
0.0008 + 0.0084i 0.0006 + 0.0083i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0006 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0082i 0.0005 + 0.0081i 0.0005 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0081i 0.0004 + 0.0080i 0.0004 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0080i 0.0003 + 0.0079i 0.0002 + 0.0079i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0002 + 0.0078i 0.0001 + 0.0077i 0.0001 + 0.0077i 0.0001 + 0.0076i 0.0000 + 0.0076i 0.0000 + 0.0075i -0.0000 + 0.0074i -0.0000 + 0.0074i -0.0000 + 0.0073i -0.0001 + 0.0073i -0.0001 + 0.0072i -0.0001 + 0.0071i -0.0001 + 0.0071i -0.0001 + 0.0070i -0.0001 + 0.0070i -0.0001 + 0.0069i -0.0001 + 0.0068i -0.0001 + 0.0068i -0.0001 + 0.0067i -0.0001 + 0.0067i -0.0001 + 0.0066i -0.0001 + 0.0066i -0.0001 + 0.0065i -0.0001 + 0.0065i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0064i -0.0001 + 0.0063i -0.0001 + 0.0063i
0.0008 - 0.0084i 0.0006 - 0.0083i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0006 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0082i 0.0005 - 0.0081i 0.0005 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0081i 0.0004 - 0.0080i 0.0004 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0080i 0.0003 - 0.0079i 0.0002 - 0.0079i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0002 - 0.0078i 0.0001 - 0.0077i 0.0001 - 0.0077i 0.0001 - 0.0076i 0.0000 - 0.0076i 0.0000 - 0.0075i -0.0000 - 0.0074i -0.0000 - 0.0074i -0.0000 - 0.0073i -0.0001 - 0.0073i -0.0001 - 0.0072i -0.0001 - 0.0071i -0.0001 - 0.0071i -0.0001 - 0.0070i -0.0001 - 0.0070i -0.0001 - 0.0069i -0.0001 - 0.0068i -0.0001 - 0.0068i -0.0001 - 0.0067i -0.0001 - 0.0067i -0.0001 - 0.0066i -0.0001 - 0.0066i -0.0001 - 0.0065i -0.0001 - 0.0065i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0064i -0.0001 - 0.0063i -0.0001 - 0.0063i
k = 1×53
0 0.4201 0.4542 0.4911 0.5309 0.5740 0.6205 0.6709 0.7253 0.7841 0.8477 0.9165 0.9908 1.0712 1.1581 1.2521 1.3536 1.4634 1.5822 1.7105 1.8493 1.9993 2.1614 2.3368 2.5263 2.7313 2.9529 3.1924 3.4514 3.7313 4.0340 4.3613 4.7151 5.0975 5.5111 5.9581 6.4415 6.9640 7.5289 8.1397 8.8000 9.5138 10.2856 11.1200 12.0220 12.9973 14.0516 15.1915 16.4238 17.7561
Since sys contains 3 poles, the size of the resultant array of poles r is 3x53. Each column in r corresponds to a gain value from vector k. For this example, rlocus automatically chose 53 values of k from zero to infinity to obtain a smooth trajectory for the three closed-loop poles.
display(r(:,39))
-3.2585 + 0.0000i -0.0145 + 0.6791i -0.0145 - 0.6791i
display(k(39))
7.5289
For instance, r(:,39) contains the above closed-loop poles for a feedback gain value of 7.5289.
For this example, consider the following SISO transfer function model:
Define the transfer function model and required vector of feedback gain values. For this example, consider a set of gain values varying from 1 to 8 with increments of 0.5 and extract the closed-loop pole locations using rlocus.
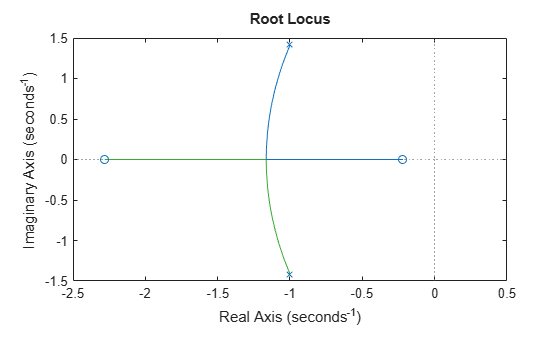
sys = tf([0.5 0 -1],[4 0 3 0 2]); k = (1:0.5:5); r = rlocus(sys,k); size(r)
ans = 1×2
4 9
Since sys contains 4 closed-loop poles, the size of the resultant array of closed-pole locations r is 4x9 where the 9 columns correspond to the 9 specific gain values defined in k.
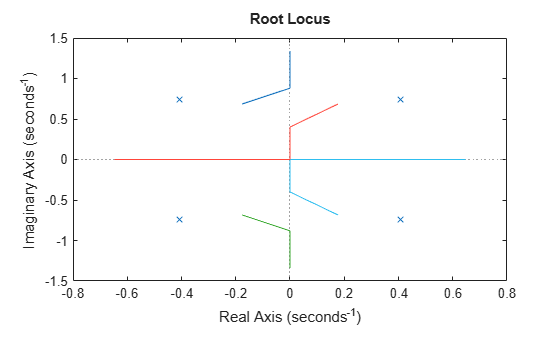
You can also visualize the trajectory of the closed-loop poles for the specific gain values in k on the root locus plot.
rlocus(sys,k)
Input Arguments
Output Arguments
Tips
For an interactive approach to root locus plotting, see Control System Designer.
For additional options for customizing the appearance of the root locus plot, use
rlocusplot.Plots created using
rlocusdo not support multiline titles or labels specified as string arrays or cell arrays of character vectors. To specify multiline titles and labels, use a single string with anewlinecharacter.rlocus(sys) title("first line" + newline + "second line");
Algorithms
The root locus of a dynamic system contains the closed-loop pole trajectories as a
function of the feedback gain k (assuming negative feedback). Root loci
are used to study the effects of varying feedback gains on closed-loop pole locations. In
turn, these locations provide indirect information on the time and frequency responses.
You can use rlocus to compute the root locus diagram of any of the
following negative feedback loops by setting sys as
shown below in the following figure.
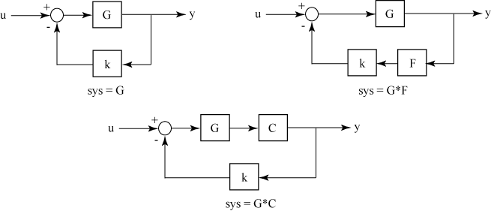
For instance, if sys is a transfer function represented by
the closed-loop poles are the roots of
A root locus plot depicts the trajectories of the closed-loop poles as the feedback gain
k varies from 0 to infinity.
Version History
Introduced before R2006aSee Also
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select: United States.
You can also select a web site from the following list
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)