SparseZeroPoleTruncation
Description
The SparseZeroPoleTruncation object uses zero-pole truncation method to obtain
low-order zero-pole-gain approximations of sparse state-space models. This method computes a
subset of the zeros and poles of sparse models, typically in a specific low-frequency band [0
fmax]. It can yield better low-frequency
approximations than modal truncation at the expense of more computation. This method also
provides direct control over the roll-off slope past the frequency
fmax.
Because this method calculates zeros for each input-output pair, it is most suitable for
models with small input-output sizes. Additionally, this method is applicable only to models
with a valid sparss representation.
Creation
The reducespec
function creates a SparseZeroPoleTruncation model order reduction object when you use this
syntax.
R = reducespec(sys,"zpk")Here, sys is a sparse LTI model. The workflow uses this object to set
up MOR tasks and store results. For the full workflow, see Task-Based Model Order Reduction Workflow.
Properties
Object Functions
view (zpk) | Plot computed poles and zeros when using zero-pole truncation method |
getrom (zpk) | Obtain reduced-order models when using zero-pole truncation method |
Examples
This example shows how to obtain a reduced-order model of a structural beam using the zero-pole truncation method. For this example, consider a SISO sparse state-space model of a cantilever beam. This example uses the linearized model from the Linear Analysis of Cantilever Beam example.
Load the beam model.
load linBeam.mat
size(sys)Sparse second-order model with 1 outputs, 1 inputs, and 3303 degrees of freedom.
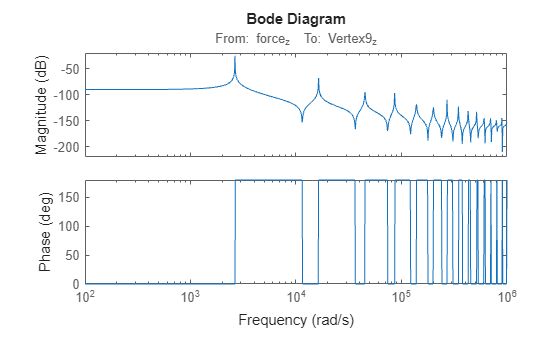
Analyze the frequency response of the model.
bodeplot(sys,w)
To perform sparse zero-pole truncation, first create a model order reduction task using reducespec with the "zpk" method.
R = reducespec(sys,"zpk");For this task, set the frequency range of focus to compute modes up to 3e5 rad/s. Doing so prevents the algorithm from computing all the poles and zeros of the sparse model, which can take a long time in some cases.
R.Options.Focus = [0 3e5];
R.Options.Display = "off";Run the model reduction algorithm. This computes the derived information, which are the poles, zeros, and gains of model, stored in the object R.
R = process(R);
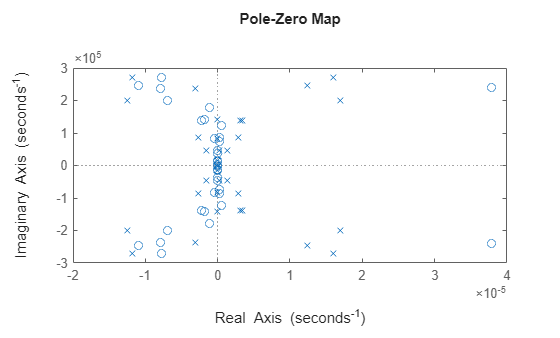
You can visualize the map of computed poles and zeros using the view function.
view(R)
Obtain the reduced zero-pole-gain approximation based on the specified frequency of focus.
rsys = getrom(R); order(rsys)
ans = 38
Compare the response of the original and reduced models.
figure; opt = bodeoptions; opt.PhaseWrapping = "on"; bodeplot(sys,rsys,"--",w,opt);
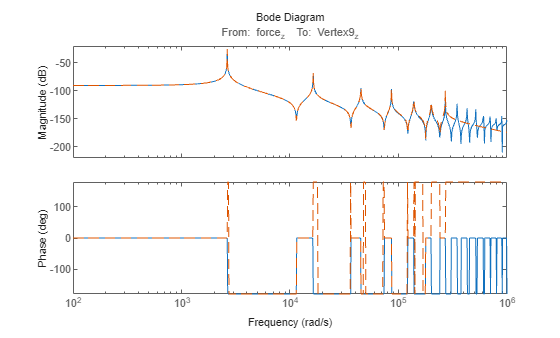
The reduced-order model provides a good approximation for the original sparse model in the specified range of interest.
This example shows how to obtain a reduced model using zero-pole truncation of a sparse state-space model. This example uses a sparse model obtained from linearizing a thermal model of heat distribution in a circular cylindrical rod.
Load the model data.
load cylindricalRod.mat
sys = sparss(A,B,C,D,E);
w = logspace(-7,-1,20);
size(sys)Sparse state-space model with 3 outputs, 1 inputs, and 7522 states.
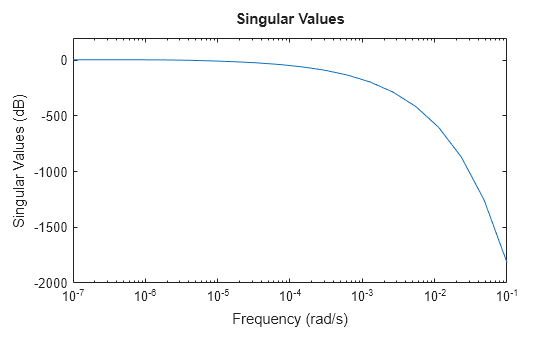
Analyze the frequency response of the model.
sigmaplot(sys,w)
Create a zero-pole truncation specification object for sys and specify the frequency band of focus. For this model, you can use a frequency range from 0 rad/s to 0.01 rad/s to obtain the low-order approximation.
R = reducespec(sys,"zpk"); R.Options.Focus = [0 1e-2]; R.Options.Display = "off";
Run the model reduction algorithm and obtain the reduced model.
R = process(R); rsys = getrom(R); sigmaplot(sys,rsys,w)
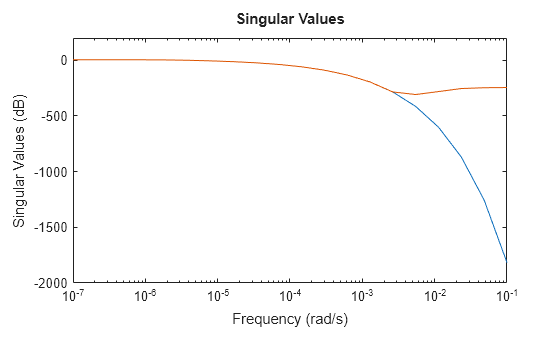
This thermal model has a very steep roll-off beyond 0.001 rad/s. By default, the reduced model obtained using getrom does not provide a good match for this roll-off. To mitigate this, you can use the RollOff argument of getrom and specify a minimum roll-off value beyond the frequency band of focus. Specify a roll-off slope value of -45, which corresponds to a rate of at least –900 db/decade.
rsys2 = getrom(R,RollOff=-45); sigmaplot(sys,rsys2,w)

The reduced model now provides a much better approximation of the roll-off value.
Algorithms
This method uses the Krylov--Schur algorithm [1] for inverse power iterations to compute poles and zeros in the specified frequency band.
References
[1] Stewart, G. W. “A Krylov--Schur Algorithm for Large Eigenproblems.” SIAM Journal on Matrix Analysis and Applications 23, no. 3 (January 2002): 601–14. https://doi.org/10.1137/S0895479800371529.
Version History
Introduced in R2025a