Deploy Pose Estimation Application Using TensorFlow Lite Model (TFLite) Model on Host and Raspberry Pi
This example shows simulation and code generation of a TensorFlow Lite model for 2D human pose estimation.
Human pose estimation is the task of predicting the pose of a human subject in an image or a video frame by estimating the spatial locations of joints such as elbows, knees, or wrists (keypoints). This example uses the MoveNet TensorFlow Lite pose estimation model from TensorFlow hub.
The pose estimation models takes a processed camera image as the input and outputs information about keypoints. The keypoints detected are indexed by a part ID, with a confidence score between 0.0 and 1.0. The confidence score indicates the probability that a keypoint exists in that position. This example can be used to estimate 17 keypoints.
Third-Party Prerequisites
Raspberry Pi hardware
TFLite library on the target ARM® hardware
Environment variables on the target for the compilers and libraries. For more information on how to build the TFLite library and set the environment variables, see Prerequisites for Deep Learning with TensorFlow Lite Models (Deep Learning Toolbox).
Download Model
This example uses MoveNet; a state-of-the-art pose estimation model. Download the model file from the TFLite website. The model file is approximately 9.4 MB in size.
if ~exist("movenet/3.tflite","file") disp('Downloading MoveNet lightning model file...'); url = "https://www.kaggle.com/models/google/movenet/TfLite/singlepose-lightning/1/download/"; websave("movenet.tar.gz",url); untar("movenet.tar.gz","movenet"); end
To load the TensorFlow Lite model, use the loadTFLiteModel function. The properties of the TFLiteModel object contains information such as the size and number of inputs and outputs in the model. For more information, see loadTFLiteModel (Deep Learning Toolbox) and TFLiteModel (Deep Learning Toolbox).
net = loadTFLiteModel('movenet/3.tflite');Inspect the TFLiteModel object.
disp(net)
TFLiteModel with properties:
ModelName: 'movenet/3.tflite'
NumInputs: 1
NumOutputs: 1
InputSize: {[192 192 3]}
OutputSize: {[1 17 3]}
InputScale: 1
InputZeroPoint: 0
OutputScale: 1
OutputZeroPoint: 0
InputType: {'single'}
OutputType: {'single'}
PreserveDataFormats: 0
NumThreads: 6
Mean: 127.5000
StandardDeviation: 127.5000
The input to the model is a frame of video or an image of size 192-by-192-by-3. The output is of size 1-by-17-by-3. The first two channels of the last dimension is the yx coordinates of the 17 keypoints. The third channel of the last dimension represents the accuracy of the prediction for each keypoint.
Load Keypoints data
Use importdata to load keypoints data. A keypoints data encapsulates the keypoints of human body.
labelsFile = importdata('keypoints.txt');Display the keypoints.
disp(labelsFile)
{'nose' }
{'left_eye' }
{'right_eye' }
{'left_ear' }
{'right_ear' }
{'left_shoulder' }
{'right_shoulder'}
{'left_elbow' }
{'right_elbow' }
{'left_wrist' }
{'right_wrist' }
{'left_hip' }
{'right_hip' }
{'left_knee' }
{'right_knee' }
{'left_ankle' }
{'right_ankle' }
Display the test image
Read image on which pose estimation has to be done.
I = imread('poseEstimationTestImage.png'); I1 = imresize(I,[192 192]); I2 = imresize(I,[450 450]); imshow(I2); axis on; hold on;

The tflite_pose_estimation_predict Entry-Point Function
The tflite_pose_estimation_predict entry-point function loads the MoveNet model into a persistent TFLiteModel object by using the loadTFLiteModel function.
type tflite_pose_estimation_predict.mfunction out = tflite_pose_estimation_predict(in)
% Copyright 2022-2024 The MathWorks, Inc.
persistent net;
if isempty(net)
net = loadTFLiteModel('movenet/3.tflite');
% Set Number of Threads based on number of threads in hardware
% net.NumThreads = 4;
end
net.Mean = 0;
net.StandardDeviation = 1;
out = net.predict(in);
end
Run MATLAB Simulation on Host
Run the simulation by passing the input image I1 to the entry-point function. This output is further processed in post processing block.
output = tflite_pose_estimation_predict(I1);
Plot the Keypoints of the Image
Set threshold Value while drawing lines to connect keypoints.
threshold = 0.29;
Get the X and Y coordinates of the keypoints. In output, First channel represents Y coordinates, Second channel represents X coordinates, Third channel represents accuracy of the keypoints.
[KeyPointXi,KeyPointYi,KeyPointAccuracy] = getKeyPointValues(net,output, ...
size(I2));Plot the keypoints which are more than threshold value. Calling PlotKeyPoints without the threshold argument will plot all the keypoints of the image.
PlotKeyPointsImage(net,KeyPointXi,KeyPointYi,KeyPointAccuracy,threshold);
Connect keypoints of the Image. Calling ConnectKeyPoints without the threshold argument will connect all keypoints
ConnectKeyPointsImage(KeyPointXi,KeyPointYi,KeyPointAccuracy,threshold);

Generate MEX Function for Pose Estimation
To generate a MEX function for a specified entry-point function, create a code configuration object for a MEX. Set the target language to C++.
cfg = coder.config('mex'); cfg.TargetLang = 'C++';
Run the codegen command to generate the MEX function tflite_pose_estimation_predict_mex on the host platform.
codegen -config cfg tflite_pose_estimation_predict -args ones(192,192,3,'single')
Code generation successful.
Run Generated MEX
Run the generated MEX by passing the input image I1. This output is further processed in post processing block.
output = tflite_pose_estimation_predict_mex(single(I1));
Plot the Keypoints of the Image
threshold = 0.29;
[KeyPointXi,KeyPointYi,KeyPointAccuracy] = getKeyPointValues(net,output, ...
size(I2));
PlotKeyPointsImage(net,KeyPointXi,KeyPointYi,KeyPointAccuracy,threshold);
ConnectKeyPointsImage(KeyPointXi,KeyPointYi,KeyPointAccuracy,threshold);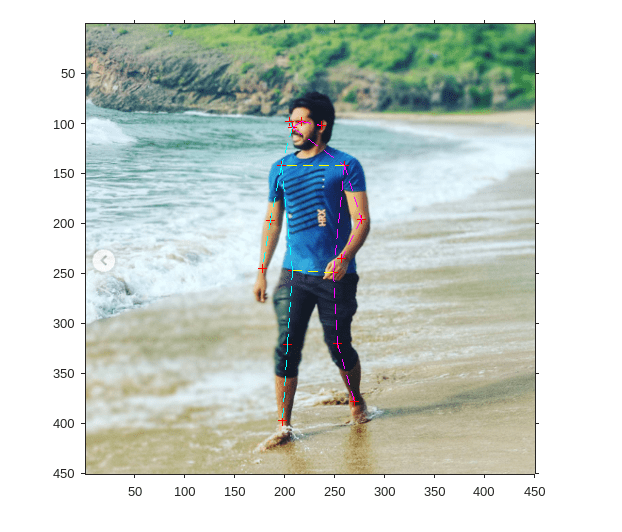
Deploy Pose Estimation Application to Raspberry Pi
Set Up Connection with Raspberry Pi
Use the Raspberry Pi® Blockset function raspi to create a connection to the Raspberry Pi.
The raspi function reuses these settings from the most recent successful connection to the Raspberry Pi hardware. This example establishes an SSH connection to the Raspberry Pi hardware using the settings stored in memory.
r = raspi;
If this is the first time connecting to a Raspberry Pi board or if you want to connect to a different board, use the following line of code:
r = raspi('raspiname','username','password');
Replace raspiname with the name of your Raspberry Pi board, username with your user name, and password with your password
Copy TFLite Model to Target Hardware
Copy TFLite Model to the Raspberry Pi board. On the hardware board, set the environment variable TFLITE_MODEL_PATH to the location of the TFLite model. For more information on setting environment variables, see Prerequisites for Deep Learning with TensorFlow Lite Models (Deep Learning Toolbox).
In the following commands, replace targetDir with the destination folder of TFLite model on the Raspberry Pi board.
r.putFile('movenet/3.tflite','/home/pi');
Generate PIL MEX Function
To generate a PIL MEX function for a specified entry-point function, create a code configuration object for a static library and set the verification mode to 'PIL'. Set the target language to C++.
cfg = coder.config('lib','ecoder',true); cfg.TargetLang = 'C++'; cfg.VerificationMode = 'PIL';
Create a coder.hardware object for Raspberry Pi and attach it to the code generation configuration object.
hw = coder.hardware('Raspberry Pi');
cfg.Hardware = hw;Run the codegen command to generate a PIL MEX function tflite_pose_estimation_predict_pil.
codegen -config cfg tflite_pose_estimation_predict -args ones(192,192,3,'single')
Run Generated PIL
Run the generated MEX by passing the input image I1. This output is further processed in post processing block.
output = tflite_pose_estimation_predict_pil(single(I1));
### Starting application: 'codegen\lib\tflite_pose_estimation_predict\pil\tflite_pose_estimation_predict.elf'
To terminate execution: clear tflite_pose_estimation_predict_pil
### Launching application tflite_pose_estimation_predict.elf...
Plot the Keypoints of the Image
threshold = 0.29;
[KeyPointXi,KeyPointYi,KeyPointAccuracy] = getKeyPointValues(net,output, ...
size(I2));
PlotKeyPointsImage(net,KeyPointXi,KeyPointYi,KeyPointAccuracy,threshold);
ConnectKeyPointsImage(KeyPointXi,KeyPointYi,KeyPointAccuracy,threshold);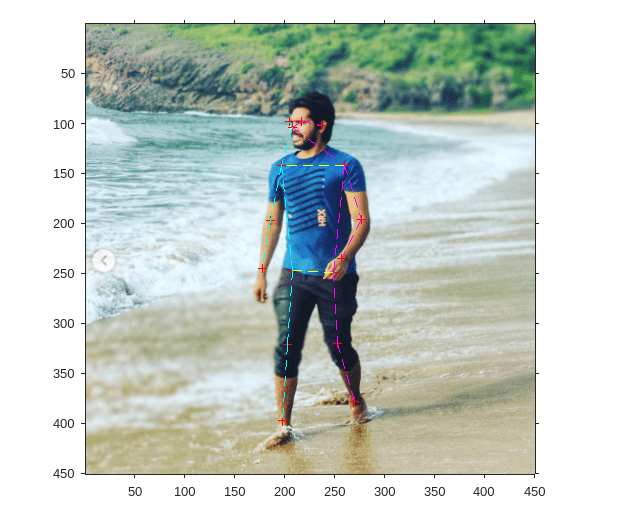
Restore the Environment
Restore the hardware environment by terminating the PIL execution process and removing the TFLite model.
clear tflite_pose_estimation_predict_pil### Host application produced the following standard output (stdout) and standard error (stderr) messages: Could not open 'movenet/3.tflite'. The model allocation is null/empty
r.deleteFile('/home/pi/Movenet.tflite');See Also
loadTFLiteModel (Deep Learning Toolbox) | predict (Deep Learning Toolbox) | TFLiteModel (Deep Learning Toolbox) | codegen
Topics
- Prerequisites for Deep Learning with TensorFlow Lite Models (Deep Learning Toolbox)
- Generate Code for TensorFlow Lite (TFLite) Model and Deploy on Raspberry Pi (Deep Learning Toolbox)