Obstacle Avoidance Using LEGO MINDSTORMS EV3 and Simulink
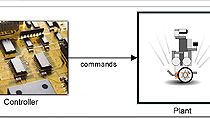
Use Simulink® support for EV3 to communicate with the robot and use Simscape Multibody™ for the 3D simulation environment. This project shows how Simulink helps -
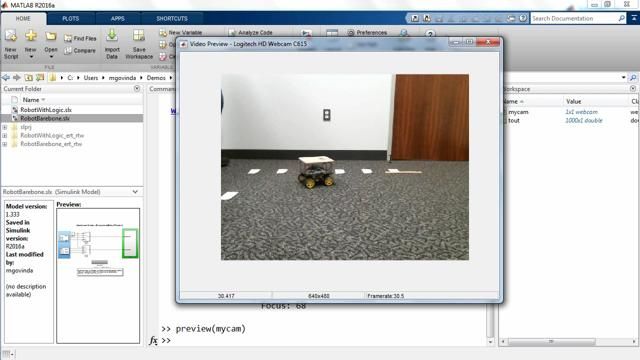
- Simulate and understand robot behavior before deploying the same code onto an EV3 robot.
- Tune parameters and monitor signals from Simulink while the code is still running on the EV3 without having to recompile. The project also demonstrates the basics of Control System Design - data acquisition, parameter estimation, and motor controller design.
To reproduce demos from this video, download the files from MATLAB File Exchange
Published: 11 Apr 2016
Featured Product