What Is Induction Motor Speed Control?
Induction motor speed control is a process of manipulating currents in an induction motor to regulate speed. While often used in fixed frequency applications, induction motors are popular for variable frequency applications such as industrial drives and electric vehicles. For variable frequency operation, an inverter modulates current to the stator windings.
Induction motors operate by a coupling of magnetic fields in the stator and rotor. Currents in the stator produce a rotating magnetic field that induce currents and a lagging magnetic field in the rotor. The magnetic field interaction causes the rotor to spin at an angular speed less than the rotational speed of the stator field. This rotational lag, called slip, provides torque at the motor shaft. Increasing load on the motor will increase slip and motor torque output.
For a squirrel cage-type induction motor, speed control using field-oriented control (FOC) regulates Id and Iq such that the flux is proportional to Id and the torque is proportional to Iq. This approach increases the speed range and improves both dynamic and steady-state performance. Simulink® lets you use multi-rate simulation to design, tune, and verify FOC algorithms across the complete operating range of the motor before hardware testing.
This Simulink diagram illustrates a typical FOC algorithm for speed control of a three-phase squirrel cage induction motor.

FOC algorithm for induction motor speed control.
The principle components of induction motor control strategies Include:
- Inner Loop (Proportional-Integral or PI)
- Q-Axis Current Control: Regulates the q-axis current to control the electrical torque applied to the motor
- D-Axis Current Control: For field-weakening control, regulates the current to reduce d-axis flux and allow the motor to rotate above its baseline speed at the expense of torque
- Outer Loop (PI): Induction motor speed control loop. This loop has a slower sample rate compared to the inner-loop (current control) and generates a torque setpoint. The setpoint is processed to create the d-axis and q-axis current reference for the inner-loop
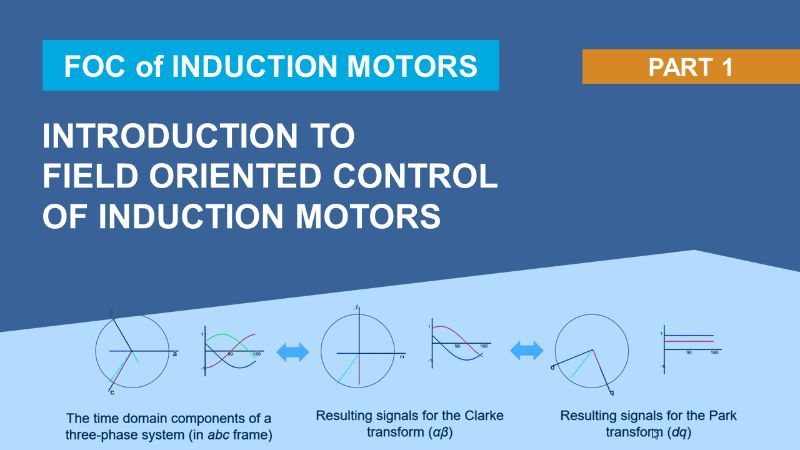
- Clarke, Park, and Inverse Park Transforms: Convert between stationary and rotating synchronous frames
- Slip Speed Estimation: Because induction motors are asynchronous, slip between the stator and rotor frequency is estimated to calculate the synchronous speed and the position of the rotor
- Space Vector Modulation (SVM): Generates modulated pulses to control the power electronics switches in the inverter
- Speed Sensor: The speed of the induction motor can be measured using a quadrature encoder or other sensor. For sensorless control of an induction motor, an observer-based algorithm replaces the physical sensor and estimates the motor speed in real-time.
Simscape Electrical and Motor Control Blockset provide induction motor and field-oriented control examples of simulation model development for induction motor speed control. Simulating induction motor speed control with Simulink helps you reduce prototype testing and lets you verify the robustness of control algorithms to fault conditions that are not practical to test on hardware.
Using Simscape Electrical and Motor Control Blockset, motor control engineers develop induction motor speed control by:
- Modeling induction motors, inverters, and speed and current controllers
- Autotuning induction motor speed control-loop gains using control design techniques
- Designing observer algorithms for estimating rotor position and speed.
- Simulating startup, shutdown, and error modes and designing derating and protection logic to ensure safe operation
- Running closed-loop simulations of the motor and controller to test system performance under normal and abnormal operating scenarios
- Generating ANSI, ISO, or processor-optimized C code and HDL from the model for rapid prototyping, hardware-in-the-loop testing, and production implementation
Examples and How To
Software Reference
See also: Simscape Electrical, Motor Control Blockset, motor control design with Simulink, power electronics control design with Simulink, dc-dc converter control, BLDC motor control, Clarke and Park transforms, space-vector-modulation