Supported PX4 Autopilots
The UAV Toolbox Support Package for PX4® Autopilots can be used to model flight control algorithms based on PX4 flight stack, and the same can be deployed on the following autopilots:
Cube Blue H7
Cube Orange
Cube Orange Plus
CUAV X7+
Pixhawk® 6c
Pixhawk 6x
Pixhawk 4
Cube (Pixhawk 2.1)
Pixhawk 1 (mRo)
Pixracer
UVify IFO-S
The support package can also be used with other PX4 Autopilots listed here that have been designed based on the Pixhawk FMU project and use a FMU configuration to build the firmware. However, the complete functionality is not tested on those controllers.
Support for PX4 Autopilots not listed above
If you have a PX4 Autopilot that is not listed above, check if that hardware is supported on the PX4 version that Simulink® currently supports (v1.15.4).
If your Autopilot is in the supported list of Autopilots for PX4 v1.15.4, you can consider using it with the support package. However, the complete functionality is not tested on those controllers. You might have a higher chance of getting it to work if you use Pixhawk Standard / Supported Autopilots. It is not recommended to use Manufacturer-Supported Autopilots. Experimental and Discontinued autopilots are not supported.
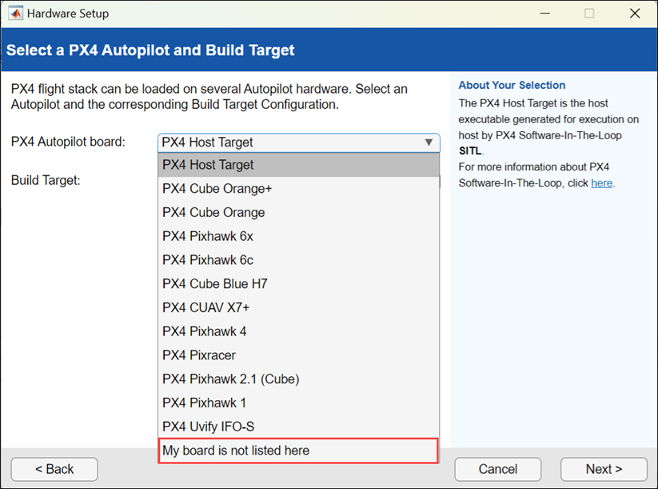
To get started with an autopilot that does not belong to set of officially tested
autopilots mentioned above, select the option My board is not listed
here in the hardware setup.
Browse to the corresponding CMake Build target in your PX4 Firmware for building.
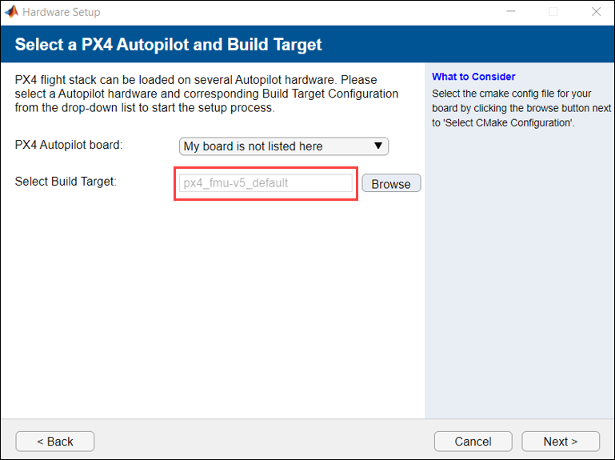
You might also need to enter the corresponding make command to build the firmware for the corresponding target.
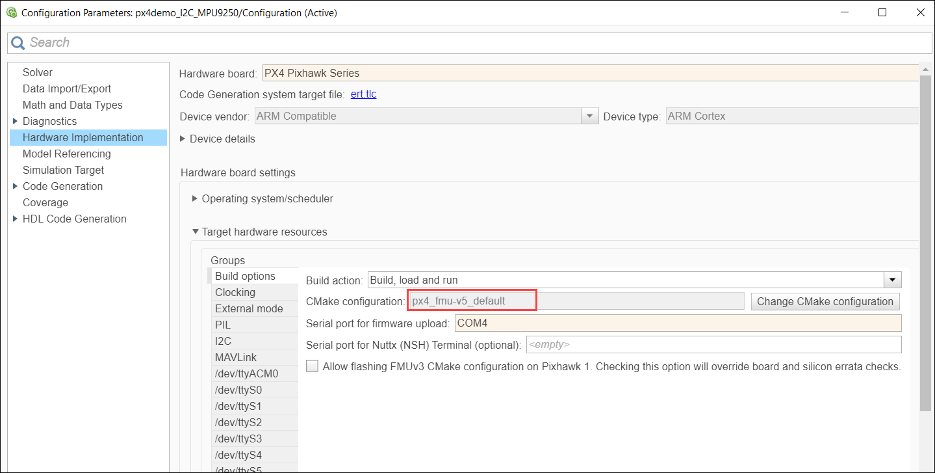
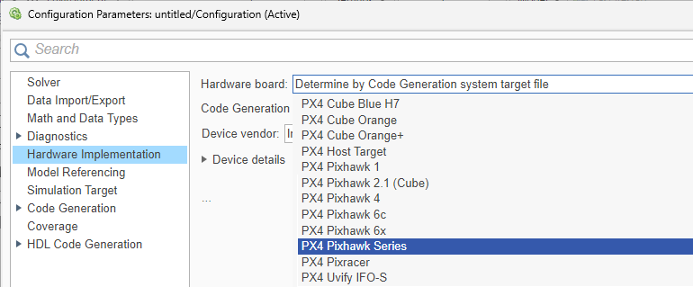
After hardware setup is complete and the PX4 Firmware is successfully built for the selected build target, you can use your autopilot in Simulink by selecting PX4 Pixhawk Series as Hardware board in the Simulink model configuration settings.
The selected CMake build target in hardware setup automatically appears in CMake configuration.