Velocity Controller
Discrete-time velocity controller

Libraries:
Simscape /
Electrical /
Control /
General Machine Control
Description
The Velocity Controller block implements a velocity controller in discrete-time.
You provide measured and reference rotor velocities (w and wref) as inputs to the block. The block then outputs a reference torque Tref for an electric drive.
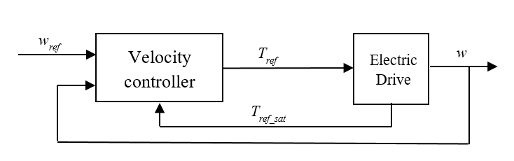
To prevent windup in the integrator, feed the saturated reference torque Tref_sat from the electric drive back to the velocity controller.
Equations
You can control the rotor angular velocity with discrete sample time Ts using one of three common approaches:
Proportional-integral (PI) control, with proportional and integral gains Kp_w and Ki_w:
Proportional (P) control, with proportional gain Kp_w:
P-PI control characterized by a double velocity feedback loop as shown in the following figure:

Here, the PI Controller block is structured as in the PI control strategy, and Kv is the proportional gain for a P controller.
Using PI control results in a zero in the closed-loop transfer function, which can result in undesired overshoot in the closed-loop response. This zero can be canceled by introducing a zero-cancellation block in the feedforward path. The zero cancellation transfer function in discrete time is
Examples

IPMSM Torque Control in a Series-Parallel HEV
A simplified series-parallel hybrid electric vehicle (HEV). An interior permanent magnet synchronous machine (IPMSM) and an internal combustion engine (ICE) provide the vehicle propulsion. The ICE also uses electric generator to recharge the high-voltage battery during driving. The vehicle transmission and differential are implemented using a fixed-ratio gear-reduction model. The Vehicle Controller subsystem converts the driver inputs into torque commands. The vehicle control strategy is implemented as a Stateflow® state machine. The ICE Controller subsystem controls the torque of the combustion engine. The Generator Controller subsystem controls the torque of the electric generator. The Drive Controller subsystem controls the torque of the IPMSM. The Scopes subsystem contains scopes that allow you to see the simulation results.

IPMSM Velocity Control
Control the rotor angular velocity in an interior permanent magnet synchronous machine (IPMSM) based automotive electrical-traction drive. A high-voltage battery feeds the IPMSM through a controlled three-phase converter. The IPMSM operates in both motoring and generating modes according to the load. An ideal torque source provides the load. The Scopes subsystem contains scopes that allow you to see the simulation results. The Control subsystem includes a multi-rate PI-based cascade control structure which has an outer angular-velocity-control loop and two inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. During the one-second simulation, the angular velocity demand is 0 rpm, 500 rpm, 2000 rpm, and then 3000 rpm.

HESM Velocity Control
Control the rotor angular velocity in a hybrid excitation synchronous machine (HESM) based electrical-traction drive. Permanent magnets and an excitation winding excite the HESM. A high-voltage battery feeds the HESM through a controlled three-phase converter for the stator windings and through a controlled four quadrant chopper for the rotor winding. An ideal torque source provides the load. The Control subsystem includes a multi-rate PI-based cascade control structure. The control structure has an outer angular-velocity-control loop and three inner current-control loops. The Visualization subsystem contains scopes that allow you to see the simulation results.
Ports
Input
Output
Parameters
Type of controller:
PI control— Proportional-integral control using a single feedback loopP control— Proportional-integral control using a single feedback loopP-PI control— Proportional and proportional-integral control using a double feedback loop
Dependencies
The Control type options affect the visibility or configurability of these parameters:
Controller integral gain
P controller proportional gain
Anti-windup gain
Integral anti-windup gain
Sample time (-1 for inherited)
Enable zero cancellation
Proportional gain for the:
PI controller
P controller in the single-loop control model
PI controller in the P-PI controller
Integral gain for the PI or P-PI controller.
Dependencies
This parameter is visible only when the Control type is set
to PI control or P-PI
control.
Proportional gain for the P controller in the P-PI controller.
Dependencies
This parameter is visible only when the Control type is set
to P-PI control.
Anti-windup gain for the PI controller.
Dependencies
This parameter is visible only when the Control type is set
to PI control or P-PI
control.
Time, in s, between consecutive block executions. During execution, the block produces outputs and, if appropriate, updates its internal state. For more information, see What Is Sample Time? and Specify Sample Time.
If this block is inside a triggered subsystem, inherit the
sample time by setting this parameter to -1. If this block is in a
continuous variable-step model, specify the sample time explicitly using a positive
scalar.
Dependencies
This parameter is visible only when the Control type is set
to PI control or P-PI
control.
Time, in s, between consecutive discretizations. Discretization is required for zero cancellation.
Dependencies
This parameter is only visible when all these conditions are met:
Control type is set to
PI controlorP-PI control.Sample time is set to
-1.Enable zero cancellation is selected
 .
.
Option to use zero cancellation on the feedforward path.
Dependencies
The Enable zero cancellation parameter is visible only when
Control type is set to PI
control or P-PI control.
The Discretization sample time parameter is only visible when
Enable zero cancellation is selected ![]() .
.
References
[1] Naouar, M. W., A. A. Naassani, E. Monmasson, and I. Slama-Belkhodja. "FPGA-based predictive current controller for synchronous machine speed drive." IEEE Transactions on Power Electronics. Vol. 23, Number 4, 2008, pp. 2115–2126.
Extended Capabilities
Version History
Introduced in R2017b