Break Algebraic Loops
This example shows how to create a MATLAB System block that can break an algebraic loop in the model.
System objects
System objects allow you to implement algorithms using MATLAB. System objects are a specialized kind of MATLAB object, designed specifically for implementing and simulating dynamic systems with inputs that change over time.
After you define a System object, you can include it in a Simulink model using a MATLAB System block.
Model Description
This example has a MATLAB System block that is used in a feedback loop in the model. The feedback loop is used to accumulate input values and the result is displayed in the Scope block. The feedback in the model creates an algebraic loop. To solve the algebraic loop, Simulink needs a block that has nondirect feedthrough. Blocks that have nondirect feedthrough are used in the feedback loops to break algebraic loops. This block can produce an output in the current time step without receiving the input first. In this example, MATLAB System block has nondirect feedthrough.

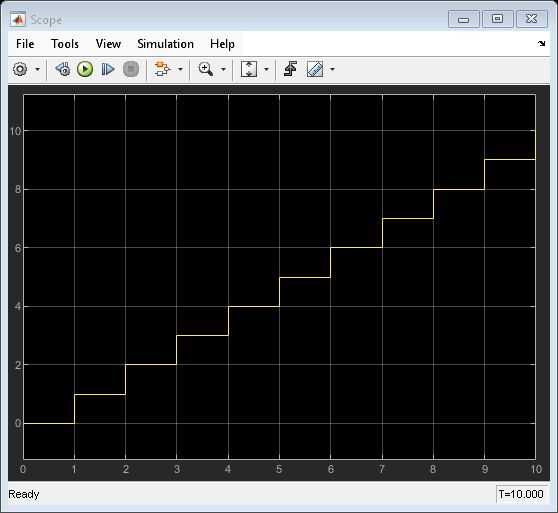
The MATLAB System block uses the System object UnitDelayNondirect that implements a unit delay. The output shows how the feedback loop accumulates the input signal values.
System Object Class Definition
You can access MATLAB source code used by the MATLAB System block by clicking the "Source Code" hyperlink from the block dialog. The UnitDelayNondirect System object implements the resetImpl, outputImpl, and updateImpl methods. The System object has one property called State.
resetImplinitializes theStateproperty to 0.outputImplreturns the value stored inState. This System object has nondirect feedthrough becauseoutputImpldoes not use any inputs.updateImpluses the inputs to updateState.
classdef UnitDelayNondirect < matlab.System
% UnitDelayNondirect Delay input by one time step
properties(DiscreteState)
State
end
methods(Access = protected)
function resetImpl(obj)
obj.State = 0; % Initialize states
end
function y = outputImpl(obj, ~)
y = obj.State; % Output current state
% Input is not used in this method
end
function updateImpl(obj,u)
obj.State = u; % Update state with input
end
end
end
See Also
Related Topics
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)