augw
Plant augmentation for weighted mixed-sensitivity H∞ and H2 loop-shaping design
Syntax
Description
P = augw(G,W1,W2,W3)P is the
augmented plant of the following diagram.
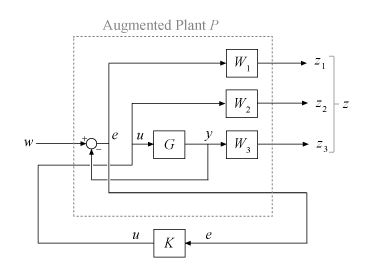
This control structure is used in mixed H∞ synthesis, which lets you design an H∞ controller by simultaneously shaping the frequency responses for tracking and disturbance rejection, noise reduction and robustness, and controller effort. For more information, see Mixed-Sensitivity Loop Shaping.
Examples
Create Augmented Plant for H-Infinity Synthesis
Suppose you want to synthesize a stabilizing robust controller for the system of the following diagram. The controller must also reject disturbances injected at the plant output.
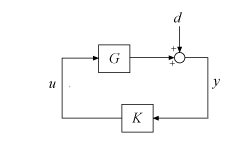
The plant, G, is an unstable first-order system.
G = tf(1,[1 -1]);
To set up this problem for hinfsyn, insert a weighting function W1 that captures the disturbance rejection goal, and another weighting function W3 to enforce robustness. Specify these weighting functions as the inverses of the desired loop shapes for the sensitivity S and complementary sensitivity T, respectively. (See Mixed-Sensitivity Loop Shaping.)
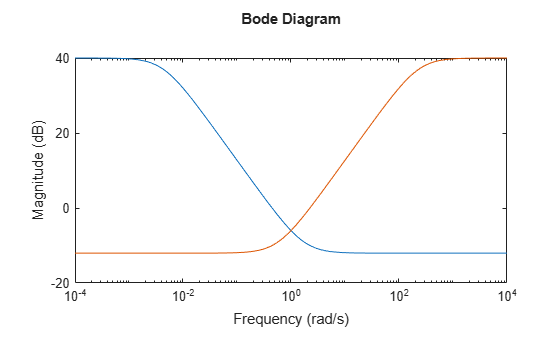
For this example, choose W1 with:
Low-frequency gain of 100 (40 dB)
0 dB crossover at 0.5 rad/s
High-frequency gain of 0.25 (
–12 dB)
Choose W3 to have the opposite low-frequency and high-frequency gains.
W1 = makeweight(100,[1 0.5],0.25); W3 = makeweight(0.25,[1 0.5],100); bodemag(W1,W3)
For this example, do not specify a W2 (no restriction on control effort). Construct the augmented plant, P.
P = augw(G,W1,[],W3);
G has one input and one output. The augmented plant has an additional input for the control signal, and additional outputs for each of the weights.
size(P)
State-space model with 3 outputs, 2 inputs, and 3 states.
The inputs and outputs of P are grouped to keep track of the disturbance and control inputs and the error and measurement outputs. For example, example the output groups. Group Y1 contains the two error outputs z, and group Y2 contains the single measurement output.
P.OutputGroup
ans = struct with fields:
Y1: [1 2]
Y2: 3
You can now use P for control design. For example, use hinfsyn to design an optimal controller that meets the design requirements specified by W1 and W3.
[K,CL,gamma] = hinfsyn(P); gamma
gamma = 0.9946
Input Arguments
Output Arguments
P — Augmented plant
dynamic system model
Augmented plant, returned as a state-space (ss) model.
P can be any LTI model with inputs
[w;u] and outputs
[z;y]. augw groups the
inputs and outputs of P using the ss
properties InputGroup and OutputGroup such
that:
P.InputGrouphas fieldU1containing the inputs corresponding to w, and fieldU2containing the inputs corresponding to u.P.OutputGrouphas fieldY1containing the outputs corresponding to z, and groupY2containing the outputs corresponding to e.
Here, {w;u} and
{z;e} are the inputs and outputs of
P in the following control system.
Tips
For H∞ or H2 synthesis, the models
GandW1,W2,W3must be proper. In other words, they must be bounded as (for continuous-time transfer functions) or (for discrete-time transfer functions). Additionally,W1,W2,W3must be stable. The plantGmust be stabilizable and detectable. Otherwise, the resultingPis not stabilizable by any controller.
Algorithms
augw produces the augmented plant
P(s) given by:
The partitioning is embedded using P = mktito(P,NY,NU), which sets the
P.InputGroup and P.OutputGroup properties as
follows.
[r,c] = size(P);
P.InputGroup = struct('U1',1:c-NU,'U2',c-NU+1:c);
P.OutputGroup = struct('Y1',1:r-NY,'Y2',r-NY+1:r);
Version History
Introduced before R2006a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)