step
Starting in R2016b, instead of using the step method to
perform the operation defined by the System object™, you can call the object with arguments, as if it were a function. For example,
y = step(obj,x) and y = obj(x) perform equivalent
operations.
Syntax
Description
Y = step(H,STEERANGLE)STEERANGLE as the subarray steering angle. This syntax is available
when you configure H so that H.Sensor is an array that
contains subarrays and H.Sensor.SubarraySteering is either
'Phase' or 'Time'.
Y = step(H,X,STEERANGLE)H so that H.TransmitSignalInputPort is
true, H.Sensor is an array that contains subarrays,
and H.Sensor.SubarraySteering is either 'Phase' or
'Time'.
Examples
GPU Clutter Simulation of Radar System with Known Power
Simulate the clutter return from terrain with a gamma value of 0 dB. The effective transmitted power of the radar system is 5 kW.
Set up the characteristics of the radar system. This system uses a 4-element uniform linear array (ULA). The sample rate is 1 MHz, and the PRF is 10 kHz. The propagation speed is the speed of light, and the operating frequency is 300 MHz. The radar platform is flying 1 km above the ground with a path parallel to the ground along the array axis. The platform speed is 2000 m/s. The mainlobe has a depression angle of 30.
Nele = 4; c = physconst('Lightspeed'); fc = 300e6; lambda = c/fc; array = phased.ULA('NumElements',Nele,'ElementSpacing',lambda/2); fs = 1e6; prf = 10e3; height = 1000.0; direction = [90;0]; speed = 2.0e3; depang = 30.0; mountingAng = [0,30,0];
Create the GPU clutter simulation object. The configuration assumes the earth is flat. The maximum clutter range of interest is 5 km, and the maximum azimuth coverage is .
Rmax = 5000; Azcov = 120; tergamma = 0; tpower = 5000; clutter = gpuConstantGammaClutter('Sensor',array, ... 'PropagationSpeed',c,'OperatingFrequency',fc,'PRF',prf, ... 'SampleRate',fs,'Gamma',tergamma,'EarthModel','Flat' ,... 'TransmitERP',tpower,'PlatformHeight',height, ... 'PlatformSpeed',speed,'PlatformDirection',direction, ... 'MountingAngles',mountingAng,'ClutterMaxRange',Rmax, ... 'ClutterAzimuthSpan',Azcov,'SeedSource','Property', ... 'Seed',40547);
Simulate the clutter return for 10 pulses.
Nsamp = fs/prf; Npulse = 10; clsig = zeros(Nsamp,Nele,Npulse); for m = 1:Npulse clsig(:,:,m) = clutter(); end
Plot the angle-Doppler response of the clutter at the 20th range bin.
response = phased.AngleDopplerResponse('SensorArray',array, ... 'OperatingFrequency',fc,'PropagationSpeed',c,'PRF',prf); plotResponse(response,shiftdim(clsig(20,:,:)),'NormalizeDoppler',true);
The results are not identical to the results obtained by using constantGammaClutter because of differences between CPU and GPU computations.
GPU Clutter Simulation With Known Transmit Signal
Simulate the clutter return from terrain with a gamma value of 0 dB. You input the transmit signal of the radar system when creating clutter. In this case, you do not specify the effective transmitted power of the signal in a property.
Set up the characteristics of the radar system. This system has a 4-element uniform linear array (ULA). The sample rate is 1 MHz, and the PRF is 10 kHz. The propagation speed is the speed of light, and the operating frequency is 300 MHz. The radar platform is flying 1 km above the ground with a path parallel to the ground along the array axis. The platform speed is 2000 m/s. The mainlobe has a depression angle of 30°.
Nele = 4; c = physconst('LightSpeed'); fc = 300e6; lambda = c/fc; ha = phased.ULA('NumElements',Nele,'ElementSpacing',lambda/2); fs = 1e6; prf = 10e3; height = 1000; direction = [90;0]; speed = 2000; mountingAng = [0,30,0];
Create the GPU clutter simulation object and configure it to take a transmitted signal as an input argument. The configuration assumes the earth is flat. The maximum clutter range of interest is 5 km, and the maximum azimuth coverage is ±60°.
Rmax = 5000; Azcov = 120; tergamma = 0; clutter = gpuConstantGammaClutter('Sensor',ha,... 'PropagationSpeed',c,'OperatingFrequency',fc,'PRF',prf,... 'SampleRate',fs,'Gamma',tergamma,'EarthModel','Flat',... 'TransmitSignalInputPort',true,'PlatformHeight',height,... 'PlatformSpeed',speed,'PlatformDirection',direction,... 'MountingAngles',mountingAng,'ClutterMaxRange',Rmax,... 'ClutterAzimuthSpan',Azcov,'SeedSource','Property','Seed',40547);
Simulate the clutter return for 10 pulses. At each object call, pass the transmit signal as an input argument. The software automatically computes the effective transmitted power of the signal. The transmit signal is a rectangular waveform with a pulse width of 2 μs.
tpower = 5000; pw = 2e-6; X = tpower*ones(floor(pw*fs),1); Nsamp = fs/prf; Npulse = 10; clsig = zeros(Nsamp,Nele,Npulse); for m = 1:Npulse clsig(:,:,m) = clutter(X); end
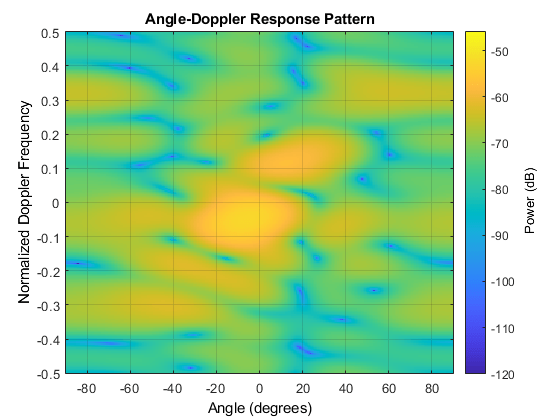
Plot the angle-Doppler response of the clutter at the 20th range bin.
response = phased.AngleDopplerResponse('SensorArray',ha,... 'OperatingFrequency',fc,'PropagationSpeed',c,'PRF',prf); plotResponse(response,shiftdim(clsig(20,:,:)),... 'NormalizeDoppler',true);
![]()
The results are not identical to the results obtained by using constantGammaClutter because of differences between CPU and GPU computations.
Input Arguments
Output Arguments
Tips
The clutter simulation that constantGammaClutter provides is
based on these assumptions:
The radar system is monostatic.
The propagation is in free space.
The terrain is homogeneous.
The clutter patch is stationary during the coherence time. Coherence time indicates how frequently the software changes the set of random numbers in the clutter simulation.
Because the signal is narrowband, the spatial response and Doppler shift can be approximated by phase shifts.
The radar system maintains a constant height during simulation.
The radar system maintains a constant speed during simulation.
Extended Capabilities
Version History
Introduced in R2021a
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)