looptune
Tune fixed-structure feedback loops
Syntax
Description
[
tunes the feedback loopG,C,gam]
= looptune(G0,C0,wc)
to meet the following default requirements:
Bandwidth — Gain crossover for each loop falls in the frequency interval
wcPerformance — Integral action at frequencies below
wcRobustness — Adequate stability margins and gain roll-off at frequencies above
wc
The tunable genss model
C0 specifies the controller structure, parameters, and
initial values. The model G0 specifies the plant.
G0 can be a Numeric LTI model, or,
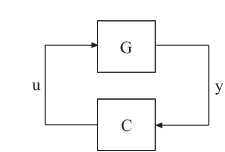
for co-tuning the plant and controller, a tunable genss model. The sensor signals
y (measurements) and actuator signals u
(controls) define the boundary between plant and controller.
Note
For tuning Simulink® models with looptune, use slTuner (Simulink Control Design) to create an
interface to your Simulink model. You can then tune the control system with looptune (Simulink Control Design) for
slTuner (requires Simulink
Control Design™).
[
tunes the feedback loop to meet additional design requirements specified in one or
more tuning goal objects G,C,gam]
= looptune(G0,C0,wc,Req1,...,ReqN)Req1,...,ReqN. Omit
wc to use the requirements specified in
Req1,...,ReqN instead of an explicit target crossover
frequency and the default performance and robustness requirements.
Examples
Tune Control System to Achieve Crossover Requirements
Tune the control system of the following illustration, to achieve crossover between 0.1 and 1 rad/min.
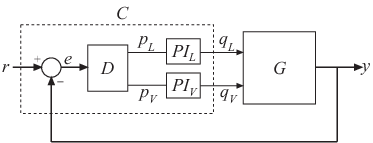
The 2-by-2 plant G is represented by:
The fixed-structure controller, C, includes three
components: the 2-by-2 decoupling matrix D and two PI
controllers PI_L and PI_V. The signals
r, y, and e are
vector-valued signals of dimension 2.
Build a numeric model that represents the plant and a tunable model that
represents the controller. Name all inputs and outputs as in the diagram, so
that looptune knows how to interconnect the plant and
controller via the control and measurement signals.
s = tf('s'); G = 1/(75*s+1)*[87.8 -86.4; 108.2 -109.6]; G.InputName = {'qL','qV'}; G.OutputName = 'y'; D = tunableGain('Decoupler',eye(2)); D.InputName = 'e'; D.OutputName = {'pL','pV'}; PI_L = tunablePID('PI_L','pi'); PI_L.InputName = 'pL'; PI_L.OutputName = 'qL'; PI_V = tunablePID('PI_V','pi'); PI_V.InputName = 'pV'; PI_V.OutputName = 'qV'; sum1 = sumblk('e = r - y',2); C0 = connect(PI_L,PI_V,D,sum1,{'r','y'},{'qL','qV'}); wc = [0.1,1]; [G,C,gam,info] = looptune(G,C0,wc);
C is the tuned controller, in this case a
genss model with the same block types as
C0.
You can examine the tuned result using loopview.
Input Arguments
Output Arguments
Algorithms
looptune automatically converts target bandwidth, performance
requirements, and additional design requirements into weighting functions that express
the requirements as an H∞ optimization
problem. looptune then uses systune to optimize tunable parameters to minimize the
H∞ norm. For more information
about the optimization algorithms, see [1].
looptune computes the
H∞ norm using the algorithm of
[2] and structure-preserving eigensolvers from the SLICOT library. For more information
about the SLICOT library, see https://github.com/SLICOT.
Alternatives
For tuning Simulink models with looptune, see slTuner (Simulink Control Design) and looptune (Simulink Control Design) (requires Simulink
Control Design).
References
[1] P. Apkarian and D. Noll, "Nonsmooth H-infinity Synthesis." IEEE Transactions on Automatic Control, Vol. 51, Number 1, 2006, pp. 71–86.
[2] Bruinsma, N.A., and M. Steinbuch. "A Fast Algorithm to Compute the H∞ Norm of a Transfer Function Matrix." Systems & Control Letters, 14, no.4 (April 1990): 287–93.
Extended Capabilities
Version History
Introduced in R2016aSee Also
TuningGoal.Tracking | slTuner (Simulink Control Design) | systune | looptune (for slTuner) (Simulink Control Design) | TuningGoal.Gain | TuningGoal.LoopShape | hinfstruct (Robust Control Toolbox) | looptuneOptions | loopview | diskmargin (Robust Control Toolbox) | genss | connect
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)