Efficiently Creating Realistic Crash Scenarios Using RoadRunner
Automating Data Conversion and Scenario Generation for Advanced Vehicle Safety Testing
“RoadRunner is an addition to our established internal workflow. The ability to use existing tools to create the necessary ASAM OpenDRIVE scenes allows us to expand our portfolio without having to undertake extensive software development.”
Key Outcomes
- Created and customized scenarios efficiently
- Delivered scenarios in standardized formats
- Improved decision-making for evaluating ADAS/AD systems in real-world crash scenarios
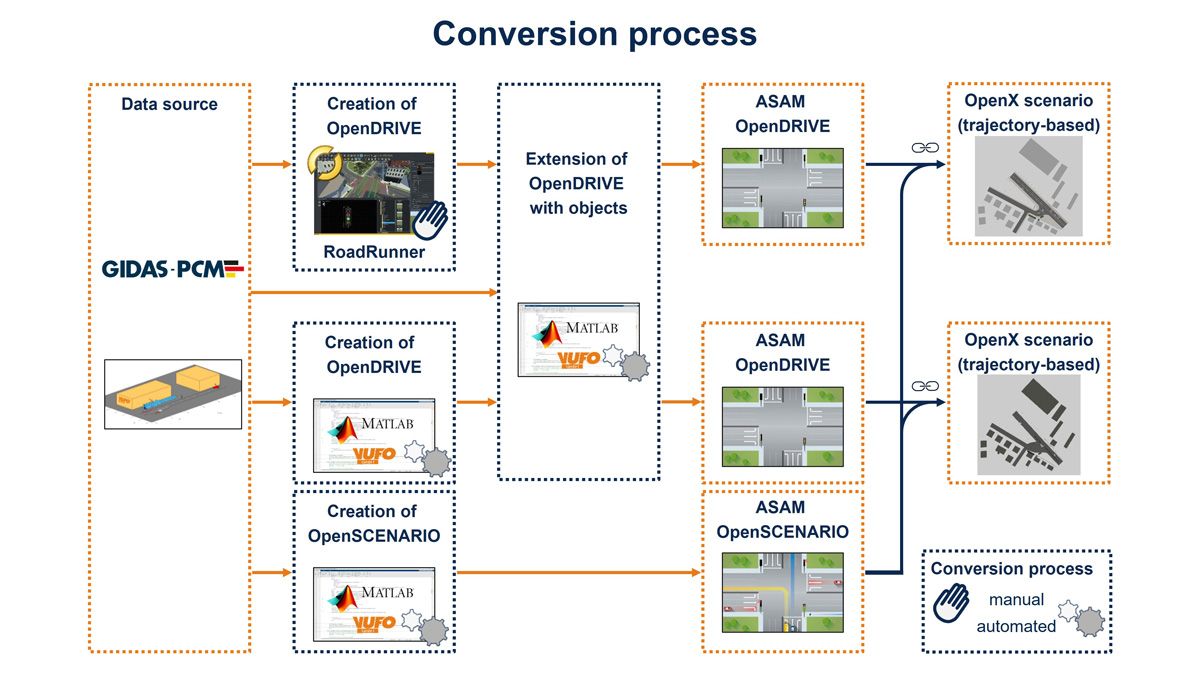
The conversion of PCM data into OpenX scenarios is largely automatic. RoadRunner is used to create complex roads and intersections in ASAM OpenDRIVE format, and MATLAB is used in an automated process to transfer the static and dynamic information of the participants into ASAM OpenSCENARIO.
Verkehrsunfallforschung an der TU Dresden (VUFO) analyzes traffic crash data to improve road safety. Utilizing sources such as GIDAS (German In-Depth Accident Study), IGLAD (Initiative for the Global Harmonization of [in-depth] Accident Data), and other official statistics, the company automatically converts crash sketches and reconstructions to the pre-crash matrix (PCM) format using MATLAB®. PCM data can then be used to create real crash scenarios containing the participants, their dynamics, and the surrounding environment.
Realistically simulating these scenarios helps to gain a deeper understanding of crashes, while also aiding virtual testing of ADAS/AD/V2X functionality, deriving modified and generic crash scenarios, and generating structured test catalogs based on real-world crash data. Multiple clients from the automotive industry use VUFO scenes and scenarios for these purposes.
There are two open data formats for simulations used by VUFO and their clients: ASAM® OpenDRIVE®, a standardized format that contains the road network as a static scene, and ASAM OpenSCENARIO®, containing the dynamic participants. ASAM OpenDRIVE scenes can easily be reused to represent other possible crash situations at the same location or to create generic scenarios.
For creating ASAM OpenDRIVE scenes, VUFO chose RoadRunner, allowing the team to expand their portfolio with relatively little effort and without extensive software development. RoadRunner enables efficient modeling of lanes and intersections with markings. The scenes are then enriched with objects like buildings and stationary vehicles to represent visual obstructions and linked with ASAM OpenSCENARIO data to create OpenX® scenarios that can be shared between various simulators. Additionally, VUFO built a tool for validation of data plausibility, ensuring accuracy and consistency. Currently, they have created more than 300 ASAM OpenDRIVE files using RoadRunner and derived more than 1,700 real-world crash scenarios by mapping multiple crash situations at the same location. They plan to increase the number of realistic crash scenarios converted to the ASAM OpenDRIVE and ASAM OpenSCENARIO formats in the future, as over 10,000 real crash scenarios are still available in PCM format.