tfest
Estimate transfer function model
Syntax
Description
Estimate Transfer Function Model
sys = tfest(tt,np)sys with
np poles, using all the input and output signals in the timetable
tt. The number of zeros in sys is max(np-1,0).
You can use this syntax for SISO and MISO systems. The function assumes that the last
variable in the timetable is the single output signal.
You cannot use tfest to estimate time-series models, which are
models that contain no inputs. Use ar, arx, or armax for time-series models instead.
sys = tfest(u,y,np)u,y. The software
assumes that the data sample time is 1 second. You cannot change this assumed sample time.
If you want to estimate a model from data with a sample time other than 1 second, you have
two alternatives:
Estimate a discrete-time system instead by setting the sample time using the
'Ts'name-value argument. For example,sys = tfest(u,y,np,'Ts',0.1)sets the sample time to0.1. You can use this syntax with SISO, MISO, and MIMO systems.Convert your matrix data to a
timetableoriddataobject prior to estimating a continuous-time system. These formats allow you to incorporate sample-time knowledge into the data. For more information, seeu,y.
Estimating continuous-time models from matrix-based data is not recommended.
sys = tfest(data,np)data. Use this
syntax especially when you want to estimate a transfer function using frequency-domain or
frequency response data, or when you want to take advantage of the additional information,
such as intersample behavior, data sample time, or experiment labeling, that data objects
provide.
sys = tfest(___,Name,Value)sys = tfest(um,ym,np,'Ts',0.1). Specify input and output signal
variable names that correspond with the variables to use for MIMO timetable data using
sys =
tfest(data,np,nz,'InputNames',["u1","u2"],'OutputNames',["y1","y3"]).
Configure Initial Parameters
Specify Additional Estimation Options
Return Estimated Initial Conditions
[
returns the estimated initial conditions as an sys,ic] = tfest(___)initialCondition
object. Use this syntax if you plan to simulate or predict the model response using the
same estimation input data and then compare the response with the same estimation output
data. Incorporating the initial conditions yields a better match between measured and
simulated or predicted data during the early stage of the simulation.
Examples
Estimate Transfer Function Model by Specifying Number of Poles
Load the time-domain system-response data in timetable tt1.
load sdata1.mat tt1;
Set the number of poles np to 2 and estimate a transfer function.
np = 2; sys = tfest(tt1,np);
sys is an idtf model containing the estimated two-pole transfer function.
View the numerator and denominator coefficients of the resulting estimated model sys.
sys.Numerator
ans = 1×2
2.4554 176.9856
sys.Denominator
ans = 1×3
1.0000 3.1625 23.1631
To view the uncertainty in the estimates of the numerator and denominator and other information, use tfdata.
Specify Number of Poles and Zeros in Estimated Transfer Function
Load time-domain system response data z2 and use it to estimate a transfer function that contains two poles and one zero.
load iddata2 z2; np = 2; nz = 1; sys = tfest(z2,np,nz);
sys is an idtf model containing the estimated transfer function.
Estimate Transfer Function Containing Known Transport Delay
Load the data z2, which is an iddata object that contains time-domain system response data.
load iddata2 z2;
Estimate a transfer function model sys that contains two poles and one zero, and which includes a known transport delay iodelay.
np = 2; nz = 1; iodelay = 0.2; sys = tfest(z2,np,nz,iodelay);
sys is an idtf model containing the estimated transfer function, with the IODelay property set to 0.2 seconds.
Estimate Transfer Function Containing Unknown Transport Delay
Load time-domain system response data z2 and use it to estimate a two-pole one-zero transfer function for the system. Specify an unknown transport delay for the transfer function by setting the value of iodelay to NaN.
load iddata2 z2; np = 2; nz = 1; iodelay = NaN; sys = tfest(z2,np,nz,iodelay);
sys is an idtf model containing the estimated transfer function, whose IODelay property is estimated using the data.
Estimate Discrete-Time Transfer Function
Load time-domain system response data, which is contained in input and output matrices umat2 and ymat2.
load sdata2.mat umat2 ymat2
Estimate a discrete-time transfer function with two poles and one zero. Specify the sample time Ts as 0.1 seconds and the transport delay iodelay as 2 seconds.
np = 2;
nz = 1;
iodelay = 2;
Ts = 0.1;
sysd = tfest(umat2,ymat2,np,nz,iodelay,'Ts',Ts)sysd =
From input "u1" to output "y1":
1.8 z^-1
z^(-2) * ----------------------------
1 - 1.418 z^-1 + 0.6613 z^-2
Sample time: 0.1 seconds
Discrete-time identified transfer function.
Parameterization:
Number of poles: 2 Number of zeros: 1
Number of free coefficients: 3
Use "tfdata", "getpvec", "getcov" for parameters and their uncertainties.
Status:
Estimated using TFEST on time domain data.
Fit to estimation data: 80.26%
FPE: 2.095, MSE: 2.063
By default, the model has no feedthrough, and the numerator polynomial of the estimated transfer function has a zero leading coefficient b0. To estimate b0, specify the Feedthrough property during estimation.
Estimate Discrete-Time Transfer Function with Feedthrough
Load the estimation data z5.
load iddata5 z5
First, estimate a discrete-time transfer function model with two poles, one zero, and no feedthrough. Get the sample time from the Ts property of z5.
np = 2;
nz = 1;
sys = tfest(z5,np,nz,'Ts',z5.Ts);The estimated transfer function has the following form:
By default, the model has no feedthrough, and the numerator polynomial of the estimated transfer function has a zero leading coefficient b0. To estimate b0, specify the Feedthrough property during estimation.
sys = tfest(z5,np,nz,'Ts',z5.Ts,'Feedthrough',true);
The numerator polynomial of the estimated transfer function now has a nonzero leading coefficient:
Analyze Origin of Delay in Measured Data
Compare two discrete-time models with and without feedthrough and transport delay.
If there is a delay from the measured input to output, it can be attributed either to a lack of feedthrough or to an actual transport delay. For discrete-time models, absence of feedthrough corresponds to a lag of one sample between the input and output. Estimating a model using Feedthrough = false and iodelay = 0 thus produces a discrete-time system that is equivalent to a system estimated using Feedthrough = true and iodelay = 1. Both systems show the same time- and frequency-domain responses, for example, on step and Bode plots. However, you get different results if you reduce these models using balred or convert them to their continuous-time representations. Therefore, a best practice is to check if the observed delay can be attributed to a transport delay or to a lack of feedthrough.
Estimate a discrete-time model with no feedthrough.
load iddata1 z1 np = 2; nz = 2; sys1 = tfest(z1,np,nz,'Ts',z1.Ts);
Because sys1 has no feedthrough and therefore has a numerator polynomial that begins with , sys1 has a lag of one sample. The IODelay property is 0.
Estimate another discrete-time model with feedthrough and with a reduction from two zeros to one, incurring a one-sample input-output delay.
sys2 = tfest(z1,np,nz-1,1,'Ts',z1.Ts,'Feedthrough',true);
Compare the Bode responses of the models.
bode(sys1,sys2);
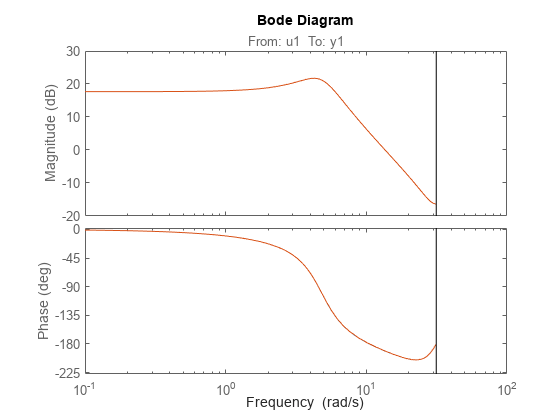
The discrete equations that underlie sys1 and sys2 are equivalent, and so are the Bode responses.
Convert the models to continuous time and compare the Bode responses for these models.
sys1c = d2c(sys1); sys2c = d2c(sys2); bode(sys1c,sys2c); legend
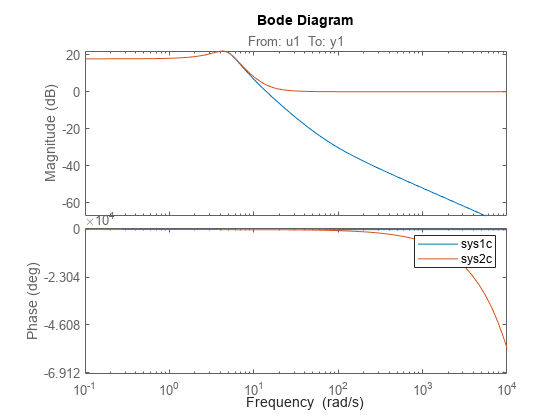
As the plot shows, the Bode responses of the two models do not match when you convert them to continuous time. When there is no feedthrough, as with sys1c, there must be some lag. When there is feedthrough, as with sys2c, there can be no lag. Continuous-time feedthrough maps to discrete-time feedthrough. Continuous-time lag maps to discrete-time delays.
Estimate MISO Discrete-Time Transfer Function with Feedthrough and Delay Specifications for Individual Channels
Estimate a two-input, one-output discrete-time transfer function with a delay of two samples on the first input and zero samples on the second input. Both inputs have no feedthrough.
Load the data and split the data into estimation and validation data sets.
load iddata7 z7 ze = z7(1:300); zv = z7(200:400);
Estimate a two-input, one-output transfer function with two poles and one zero for each input-to-output transfer function.
Lag = [2;0]; Ft = [false,false]; model = tfest(ze,2,1,'Ts',z7.Ts,'Feedthrough',Ft,'InputDelay',Lag);
The Feedthrough value you choose dictates whether the leading numerator coefficient is zero (no feedthrough) or not (nonzero feedthrough). Delays are generally expressed separately using the InputDelay or IODelay property. This example uses InputDelay only to express the delays.
Validate the estimated model. Exclude the data outliers for validation.
I = 1:201;
I(114:118) = [];
opt = compareOptions('Samples',I);
compare(zv,model,opt)![]()
Estimate Transfer Function Model Using Regularized Impulse Response Model
Identify a 15th order transfer function model by using regularized impulse response estimation.
Load the data.
load regularizationExampleData m0simdata;
Obtain a regularized impulse response (FIR) model.
opt = impulseestOptions('RegularizationKernel','DC'); m0 = impulseest(m0simdata,70,opt);
Convert the model into a transfer function model after reducing the order to 15.
m = idtf(balred(idss(m0),15));
Compare the model output with the data.
compare(m0simdata,m);
![]()
Estimate Transfer Function Using Estimation Option Set
Create an option set for tfest that specifies the initialization and search methods. Also set the display option, which specifies that the loss-function values for each iteration be shown.
opt = tfestOptions('InitializeMethod','n4sid','Display','on','SearchMethod','lsqnonlin');
Load time-domain system response data z2 and use it to estimate a transfer function with two poles and one zero. Specify opt for the estimation options.
load iddata2 z2; np = 2; nz = 1; iodelay = 0.2; sys = tfest(z2,np,nz,iodelay,opt);
sys is an idtf model containing the estimated transfer function.
Specify Model Properties of Estimated Transfer Function
Load the time-domain system response data z2, and use it to estimate a two-pole, one-zero transfer function. Specify an input delay.
load iddata2 z2; np = 2; nz = 1; input_delay = 0.2; sys = tfest(z2,np,nz,'InputDelay',input_delay);
sys is an idtf model containing the estimated transfer function with an input delay of 0.2 seconds.
Convert Frequency-Response Data into Transfer Function
Use bode to obtain the magnitude and phase response for the following system:
Use 100 frequency points, ranging from 0.1 rad/s to 10 rad/s, to obtain the frequency-response data. Use frd to create a frequency-response data object.
freq = logspace(-1,1,100); [mag,phase] = bode(tf([1 0.2],[1 2 1 1]),freq); data = frd(mag.*exp(1j*phase*pi/180),freq);
Estimate a three-pole, one-zero transfer function using data.
np = 3; nz = 1; sys = tfest(data,np,nz);
sys is an idtf model containing the estimated transfer function.
Estimate Transfer Function with Known Transport Delays for Multiple Inputs
Load the time-domain system response data co2data, which contains the data from two experiments, each with two inputs and one output. Convert the data from the first experiment into an iddata object data with a sample time of 0.5 seconds.
load co2data;
Ts = 0.5;
data = iddata(Output_exp1,Input_exp1,Ts);Specify estimation options for the search method and the input and output offsets. Also specify the maximum number of search iterations.
opt = tfestOptions('SearchMethod','gna'); opt.InputOffset = [170;50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50;
Estimate a transfer function using the measured data and the estimation option set opt. Specify the transport delays from the inputs to the output.
np = 3; nz = 1; iodelay = [2 5]; sys = tfest(data,np,nz,iodelay,opt);
iodelay specifies the input-to-output delay from the first and second inputs to the output as 2 seconds and 5 seconds, respectively.
sys is an idtf model containing the estimated transfer function.
Estimate Transfer Function with Known and Unknown Transport Delays
Load time-domain system response data and use it to estimate a transfer function for the system. Specify the known and unknown transport delays.
load co2data;
Ts = 0.5;
data = iddata(Output_exp1,Input_exp1,Ts);data is an iddata object with two input channels and one output channels, and which has a sample rate of 0.5 seconds.
Create an option set opt. Specify estimation options for the search method and the input and output offsets. Also specify the maximum number of search iterations.
opt = tfestOptions('Display','on','SearchMethod','gna'); opt.InputOffset = [170; 50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50;
Specify the unknown and known transport delays in iodelay, using 2 for a known delay of 2 seconds and nan for the unknown delay. Estimate the transfer function using iodelay and opt.
np = 3; nz = 1; iodelay = [2 nan]; sys = tfest(data,np,nz,iodelay,opt);
sys is an idtf model containing the estimated transfer function.
Estimate Transfer Function with Unknown, Constrained Transport Delays
Create a transfer function model with the expected numerator and denominator structure and delay constraints.
In this example, the experiment data consists of two inputs and one output. Both transport delays are unknown and have an identical upper bound. Additionally, the transfer functions from both inputs to the output are identical in structure.
init_sys = idtf(NaN(1,2),[1,NaN(1,3)],'IODelay',NaN);
init_sys.Structure(1).IODelay.Free = true;
init_sys.Structure(1).IODelay.Maximum = 7;init_sys is an idtf model describing the structure of the transfer function from one input to the output. The transfer function consists of one zero, three poles, and a transport delay. The use of NaN indicates unknown coefficients.
init_sys.Structure(1).IODelay.Free = true indicates that the transport delay is not fixed.
init_sys.Structure(1).IODelay.Maximum = 7 sets the upper bound for the transport delay to 7 seconds.
Specify the transfer function from both inputs to the output.
init_sys = [init_sys,init_sys];
Load time-domain system response data and use it to estimate a transfer function. Specify options in the tfestOptions option set opt.
load co2data; Ts = 0.5; data = iddata(Output_exp1,Input_exp1,Ts); opt = tfestOptions('Display','on','SearchMethod','gna'); opt.InputOffset = [170;50]; opt.OutputOffset = mean(data.y(1:75)); opt.SearchOptions.MaxIterations = 50; sys = tfest(data,init_sys,opt);
sys is an idtf model containing the estimated transfer function.
Analyze the estimation result by comparison. Create a compareOptions option set opt2 and specify input and output offsets, and then use compare.
opt2 = compareOptions; opt2.InputOffset = opt.InputOffset; opt2.OutputOffset = opt.OutputOffset; compare(data,sys,opt2)
![]()
Estimate Transfer Function Containing Different Numbers of Poles for Input-Output Pairs
Estimate a multiple-input, single-output transfer function containing different numbers of poles for input-output pairs for given data.
Obtain frequency-response data.
For example, use frd to create a frequency-response data model for the following system:
Use 100 frequency points, ranging from 0.01 rad/s to 100 rad/s, to obtain the frequency-response data.
G = tf({[1 2],[5]},{[1 2 4 5],[1 2 1 1 0]},0,'IODelay',[4 0.6]);
data = frd(G,logspace(-2,2,100));data is an frd object containing the continuous-time frequency response for G.
Estimate a transfer function for data.
np = [3 4]; nz = [1 0]; iodelay = [4 0.6]; sys = tfest(data,np,nz,iodelay);
np specifies the number of poles in the estimated transfer function. The first element of np indicates that the transfer function from the first input to the output contains three poles. Similarly, the second element of np indicates that the transfer function from the second input to the output contains four poles.
nz specifies the number of zeros in the estimated transfer function. The first element of nz indicates that the transfer function from the first input to the output contains one zero. Similarly, the second element of np indicates that the transfer function from the second input to the output does not contain any zeros.
iodelay specifies the transport delay from the first input to the output as 4 seconds. The transport delay from the second input to the output is specified as 0.6 seconds.
sys is an idtf model containing the estimated transfer function.
Estimate Transfer Function for Unstable System
Estimate a transfer function describing an unstable system using frequency-response data.
Use idtf to construct a transfer function model G of the following system:
G = idtf({[1 2], 5},{[1 2 4 5],[1 2 1 1 1]});Use idfrd to obtain a frequency-response data model data for G. Specify 100 frequency points ranging from 0.01 rad/s to 100 rad/s.
data = idfrd(G,logspace(-2,2,100));
data is an idfrd object.
Estimate a transfer function for data.
np = [3 4]; nz = [1 0]; sys = tfest(data,np,nz);
np specifies the number of poles in the estimated transfer function. The first element of np indicates that the transfer function from the first input to the output contains three poles. Similarly, the second element of np indicates that the transfer function from the second input to the output contains four poles.
nz specifies the number of zeros in the estimated transfer function. The first element of nz indicates that the transfer function from the first input to the output contains one zero. Similarly, the second element of nz indicates that the transfer function from the second input to the output does not contain any zeros.
sys is an idtf model containing the estimated transfer function.
pole(sys)
ans = 7×1 complex
-1.5260 + 0.0000i
-0.2370 + 1.7946i
-0.2370 - 1.7946i
-1.4656 + 0.0000i
-1.0000 + 0.0000i
0.2328 + 0.7926i
0.2328 - 0.7926i
sys is an unstable system, as the pole display indicates.
Estimate Transfer Function using High Modal Density Frequency Response Data
Load the high-density frequency-response measurement data. The data corresponds to an unstable process maintained at equilibrium using feedback control.
load HighModalDensityData FRF f
Package the data as an idfrd object for identification and find the Bode magnitude response.
G = idfrd(permute(FRF,[2 3 1]),f,0,'FrequencyUnit','Hz'); bodemag(G)
![]()
Estimate a transfer function with 32 poles and 32 zeros, and compare the Bode magnitude response.
sys = tfest(G,32,32); bodemag(G, sys) xlim([0.01,2e3]) legend
![]()
Obtain and Apply Estimated Initial Conditions
Load and plot the data.
load iddata1ic z1i plot(z1i)
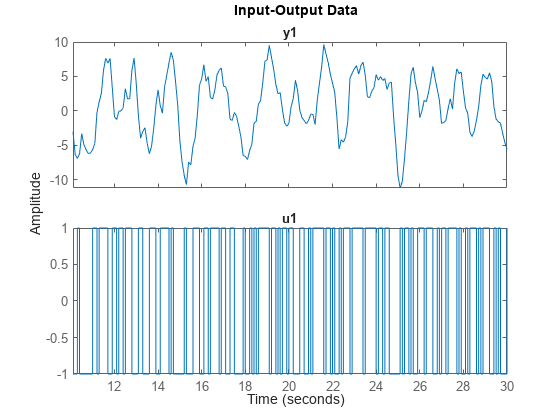
Examine the initial value of the output data y(1).
ystart = z1i.y(1)
ystart = -3.0491
The measured output does not start at 0.
Estimate a second-order transfer function sys and return the estimated initial condition ic.
[sys,ic] = tfest(z1i,2,1); ic
ic =
initialCondition with properties:
A: [2x2 double]
X0: [2x1 double]
C: [0.2957 5.2441]
Ts: 0
ic is an initialCondition object that encapsulates the free response of sys, in state-space form, to the initial state vector in X0.
Simulate sys using the estimation data but without incorporating the initial conditions. Plot the simulated output with the measured output.
y_no_ic = sim(sys,z1i); plot(y_no_ic,z1i) legend('Model Response','Output Data')
The measured and simulated outputs do not agree at the beginning of the simulation.
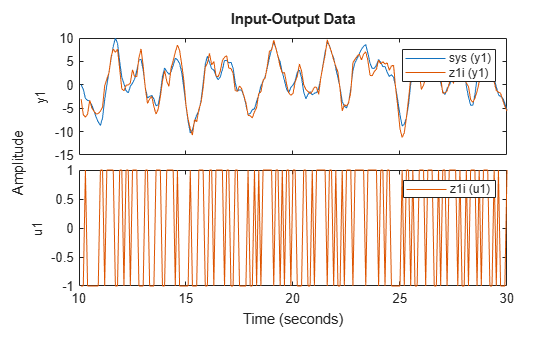
Incorporate the initial condition into the simOptions option set.
opt = simOptions('InitialCondition',ic); y_ic = sim(sys,z1i,opt); plot(y_ic,z1i) legend('Model Response','Output Data')
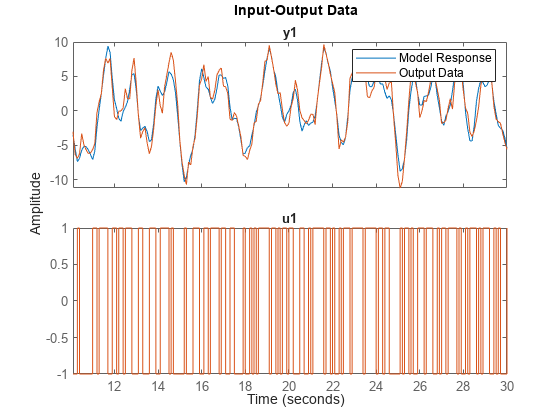
The simulation combines the model response to the input signal with the free response to the initial condition. The measured and simulated outputs now have better agreement at the beginning of the simulation. This initial condition is valid only for the estimation data z1i.
Input Arguments
Output Arguments
Algorithms
References
[1] Garnier, H., M. Mensler, and A. Richard. “Continuous-Time Model Identification from Sampled Data: Implementation Issues and Performance Evaluation.” International Journal of Control 76, no. 13 (January 2003): 1337–57. https://doi.org/10.1080/0020717031000149636.
[2] Ljung, Lennart. “Experiments with Identification of Continuous Time Models.” IFAC Proceedings Volumes 42, no. 10 (2009): 1175–80. https://doi.org/10.3182/20090706-3-FR-2004.00195.
[3] Young, Peter, and Anthony Jakeman. “Refined Instrumental Variable Methods of Recursive Time-Series Analysis Part III. Extensions.” International Journal of Control 31, no. 4 (April 1980): 741–64. https://doi.org/10.1080/00207178008961080.
[4] Drmač, Z., S. Gugercin, and C. Beattie. “Quadrature-Based Vector Fitting for Discretized H2 Approximation.” SIAM Journal on Scientific Computing 37, no. 2 (January 2015): A625–52. https://doi.org/10.1137/140961511.
[5] Ozdemir, Ahmet Arda, and Suat Gumussoy. “Transfer Function Estimation in System Identification Toolbox via Vector Fitting.” IFAC-PapersOnLine 50, no. 1 (July 2017): 6232–37. https://doi.org/10.1016/j.ifacol.2017.08.1026.
Version History
Introduced in R2012aSee Also
tfestOptions | idtf | timetable | ssest | procest | ar | arx | oe | bj | polyest | greyest
Topics
- Estimate Transfer Function Models at the Command Line
- Estimate Transfer Function Models with Transport Delay to Fit Given Frequency-Response Data
- Estimate Transfer Function Models with Prior Knowledge of Model Structure and Constraints
- Apply Initial Conditions When Simulating Identified Linear Models
- Troubleshoot Frequency-Domain Identification of Transfer Function Models
- What are Transfer Function Models?
- Regularized Estimates of Model Parameters
- Estimating Models Using Frequency-Domain Data
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)