Linear Grey-Box Models
Functions
greyest | Estimate ODE parameters of linear grey-box model |
idgrey | Linear ODE (grey-box model) with identifiable parameters |
pem | Prediction error minimization for refining linear and nonlinear models |
findstates | Estimate initial states of model |
init | Set or randomize initial parameter values |
getpvec | Obtain model parameters and associated uncertainty data |
setpvec | Modify values of model parameters |
getpar | Obtain attributes such as values and bounds of linear model parameters |
setpar | Set attributes such as values and bounds of linear model parameters |
findstatesOptions | Option set for findstates |
greyestOptions | Option set for greyest |
Examples and How To
- Estimate Linear Grey-Box Models
How to define and estimate linear grey-box models at the command line.
- Estimate Continuous-Time Grey-Box Model for Heat Diffusion
This example shows how to estimate the heat conductivity and the heat-transfer coefficient of a continuous-time grey-box model for a heated-rod system.
- Estimate Discrete-Time Grey-Box Model with Parameterized Disturbance
This example shows how to create a single-input and single-output grey-box model structure when you know the variance of the measurement noise.
- Estimate State-Space Models with Structured Parameterization
Structured parameterization lets you exclude specific parameters from estimation by setting these parameters to specific values.
- Estimate Coefficients of ODEs to Fit Given Solution
Estimate model parameters using linear and nonlinear grey-box modeling.
- Estimate Model Using Zero/Pole/Gain Parameters
This example shows how to estimate a model that is parameterized by poles, zeros, and gains.
Concepts
- Supported Grey-Box Models
Types of supported grey-box models.
- Data Supported by Grey-Box Models
Types of supported data for estimating grey-box models.
- Choosing idgrey or idnlgrey Model Object
Difference between
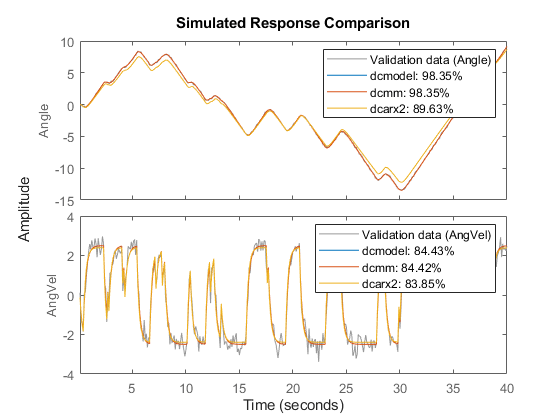
idgreyandidnlgreymodel objects for representing grey-box model objects. - Identifying State-Space Models with Separate Process and Measurement Noise Descriptions
An identified linear model is used to simulate and predict system outputs for given input and noise signals.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina (Español)
- Canada (English)
- United States (English)
Europe
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)